遗留问题:
波特率如何能够配置:parameter 中断如何设计 buffer大小如何配置 如何在线配置波特率 需要缓存怎么解决 满了怎么处理,不满怎么处理 buffer如果不满,传输完了怎么处理:这里last标志,拉高代表最后一次数据传说
一、基础知识篇
1、串行通信基础知识
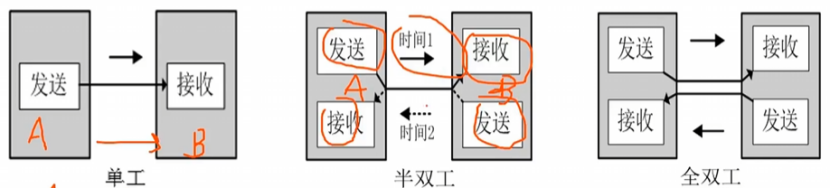
并行通信:多条数据线同时传输数据,传输速度快、占用引脚资源多。 串行通信:一条传输线上逐个传输,线路简单占用引脚少,传输速度慢; 同步通信:时钟线+数据线。发送设备与接收设备同时受1个时钟配置 异步通信:仅数据传输线。各自有自己的时钟,用波特率约束传输 串行数据的方向:单工、半双工、全双工 
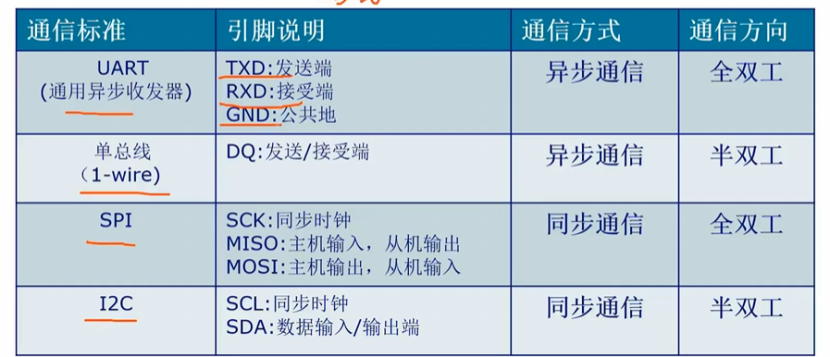
常见串行通信接口
UART: 单总线: SPI:M mast, I input,S slave,O output I2C: 
2、异步串口通信UART基础知识
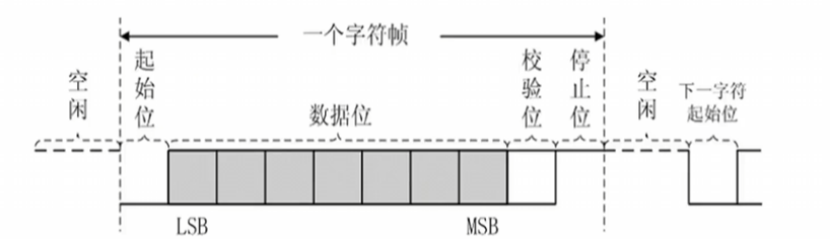
什么是UART,universal asynchronous receiver transmitter, ①协议层 协议层:数据格式 
协议层:传输速率 串口通信常用波特率表示,表示每秒传输二进制数据的位数,单位bps(位/秒),常用波特率9600、19200、38400、57600、115200等 波特率的计算: 1 s = 10e9 ns 1bit所需要占用的时间:10e9 / 115200 50Mhz时钟一个完整的时钟周期为20ns 需要多少个时钟周期传输1bit:10e9 / 115200 / 20 = 434个时钟周期
②物理层 物理层:接口标准 
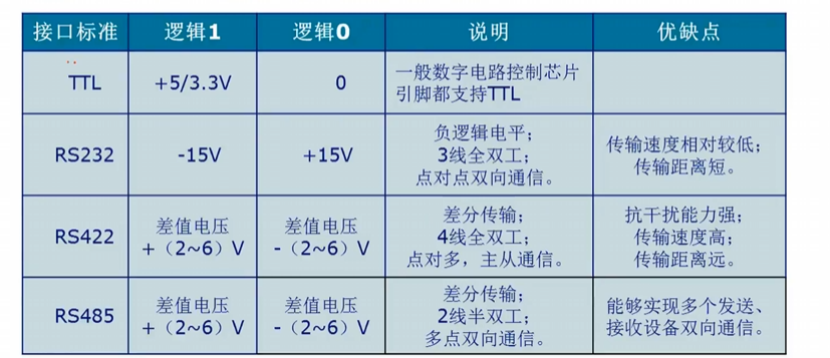
3、RS232接口
DB9接口 
 RXD、TXD、GND三个接口组成了串口通信
RXD、TXD、GND三个接口组成了串口通信
4、USB接口 Date+-:一对差分线组成信号线,用于传输数据 ID:用于识别Type型号 
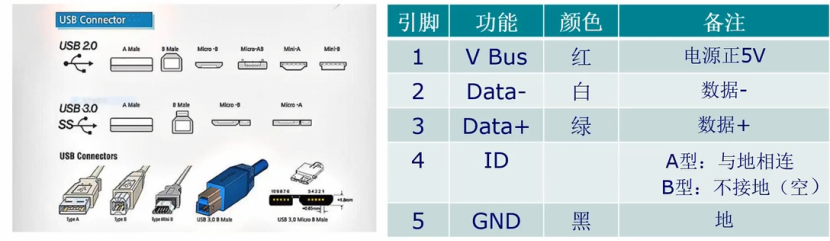
CH340C芯片可以将USB转串口,后续可用该设备通过串口助手将PC端和FPGA进行通信。
二、代码设计
一、波特率的计算
1、什么是波特率
波特率(bandrate),指的是串口通信的速率,也就是串口通信时每秒钟可以传输多少个二进制位。比如每秒钟可以传输9600个二进制(传输一个二进制位需要的时间是1/9600秒,也就是104us),波特率就是9600。
串口的通信波特率不能随意设定,而应该再一些值中去选择。一般常见的波特率是9600或者115200(低端的单片机如51常用9600,高端的单片机和嵌入式Coc一般用115200)。为什么波特率不能随便指定?主要是因为:
第一:通信双方必须事先设定相同的波特率这样才能成功通信,如果发送方和接收方按照不同的波特率通信则根本收不到,因此波特率最好是大家熟知的而不是随意指定。
第二:常用的波特率经过了长久的发展,就形成了共识,大家常用的就是9600或者115200。标准波特率:包括2400、4800、9600、19200、38400、57600、115200等标准波特率。
2、波特率的含义
波特率表示每秒钟传送的码元bai符号的个数,du是衡量数据传送速率的指标,它用单位时间内载波zhi调制状态改变的次数来表示。
在信息传输通道中,携带数据信息的信号单元叫码元,每秒钟通过信道传输的码元数称为码元传输速率,简称波特率。波特率是传输通道频宽的指标。
3、波特率计算举例
例如7Z010clg400的FPAG芯片,系统时钟频率为50Mhz,若需要配置9600波特率,工程中应将50M/9600=5208个时钟周期传输1个码元,即可实现1s中传输9600个二进制位。
二、代码设计
接收端模块 
接收端代码:见文末 接收端仿真代码:见文末 接收端仿真结果 
发送端模块 
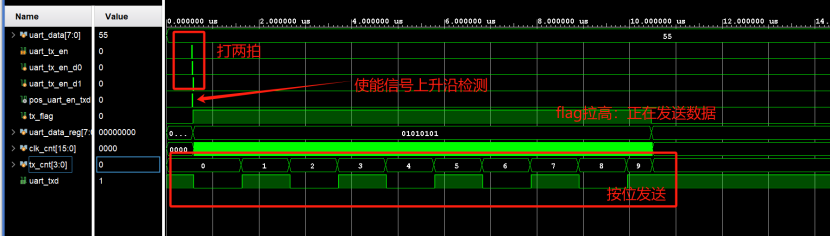
发送端代码:见文末 发送端仿真代码:见文末 发送端仿真结果 
top顶层设计 
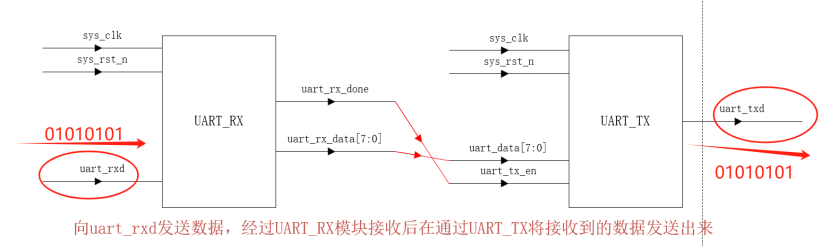
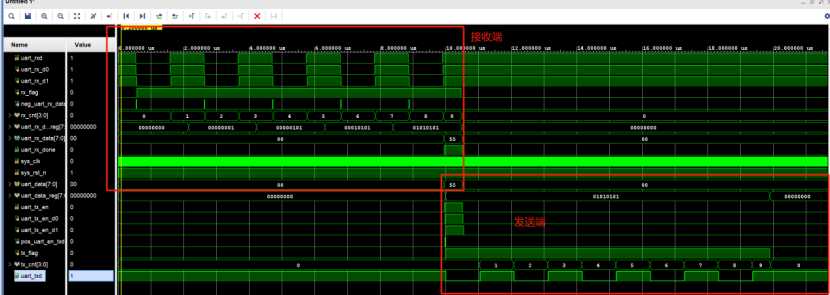
top顶层代码:见文末 top顶层仿真代码:见文末 top仿真结果 
 三、上板验证流程
三、上板验证流程
验证流程
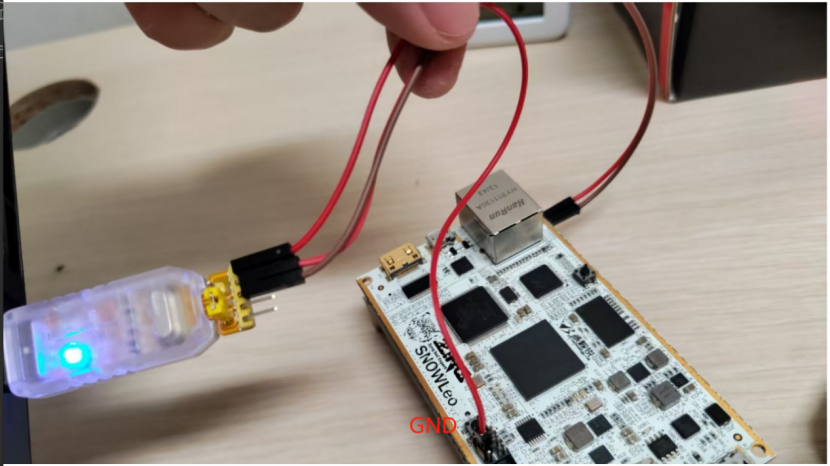
仿真时是模拟输入一段串口数据,接收端接收数据后将相同数据通过发送端传回。因此我们首先需要想办法通过PC给uart_rxd这根线传输一段串口数据。前面提到CH340C芯片可以将USB转ttl,因此可以通过串口助手将信号传给fpga。下图为搭载CH340C芯片的usb转串口设备。 
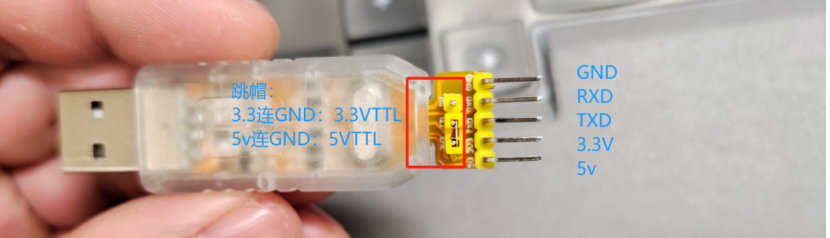
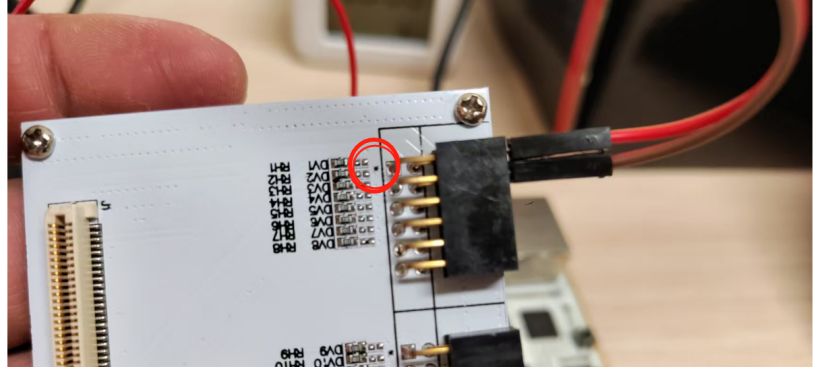
连接线路,将CH340C的发送端连接fpga接收端,CH340C接收端连接fpga发送端 
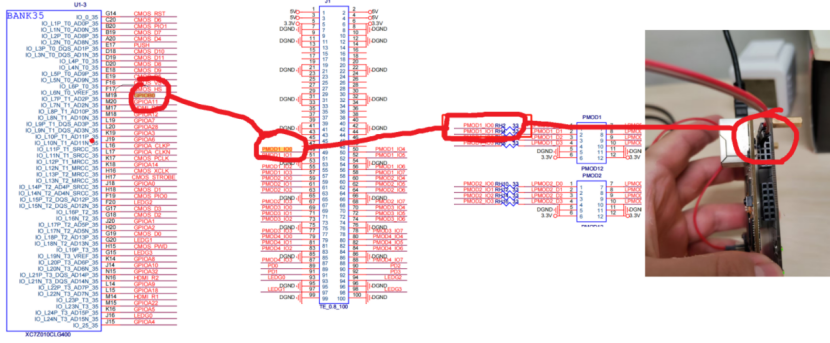
分配fpga的引脚 

通过查询硬件原理图,将引脚分配给M19和U14 
上板测试发现发送55后未收到数据 
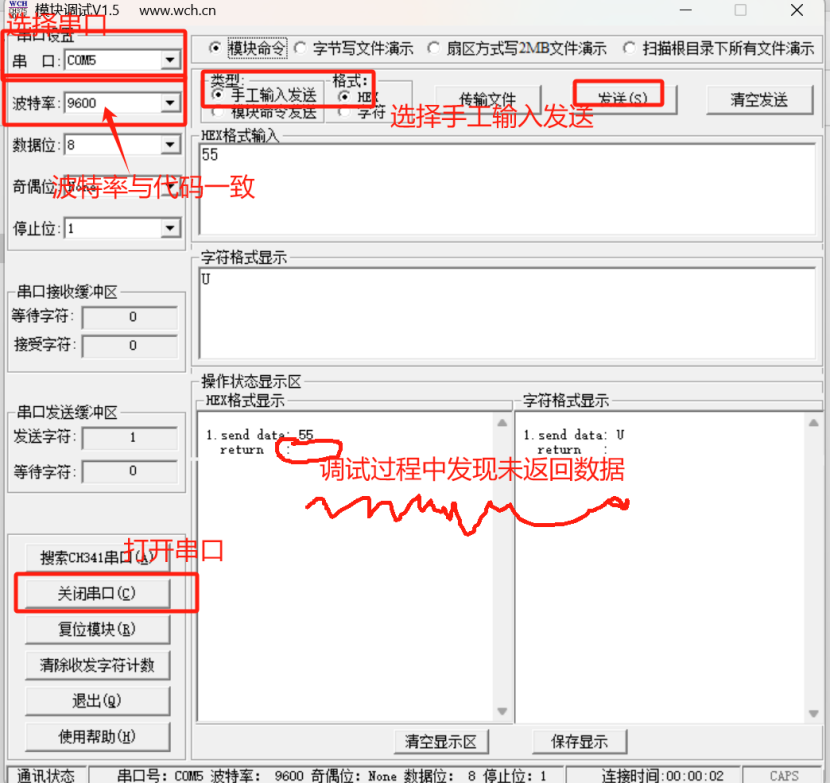
此时无论如何测试都无法收到数据,但是通过插拔杜邦线产生的电平波动是可以传回混乱的数据的。此时认为理论上应该正确,排查错误点
思路:Uart_rx和Uart_tx同时使用,无法准确定位问题出处,若更改代码只保留TX端,通过按键,每按一次按键,向CH340C发送一串固定数据,则可证明FPGA是可以将数据以uart协议传输出去的。如果证明以上猜测,那问题定位可近一步缩减范围。
按键发送uart代码设计
module uart_tx(
input sys_clk,//50M系统时钟
input sys_rst_n,//系统复位
input uart_tx_en,//发送使能信号
output reg uart_txd//串口发送数据线
);
parameter SYS_CLK_FRE=50_000_000;//50M系统时钟
parameter BPS= 9_600;//波特率9600bps,可更改
localparam BPS_CNT= SYS_CLK_FRE/BPS;//传输一位数据所需要的时钟个数
reg uart_tx_en_d0;//寄存1拍
reg uart_tx_en_d1;//寄存2拍
reg tx_flag;//发送标志位
reg [7:0] uart_data_reg;//发送数据寄存器
reg [15:0] clk_cnt;//时钟计数器
reg [3:0] tx_cnt;//发送个数计数器
reg [7:0] uart_data= 8'b01010101;//发送的8位置数据
wire pos_uart_en_txd;//使能信号的上升沿
assign pos_uart_en_txd = uart_tx_en_d0 && (~uart_tx_en_d1);//捕捉使能端的上升沿信号,用来标志输出开始传输
always @(posedge sys_clk or negedge sys_rst_n)begin//开始传输使能信号打两拍,消除亚稳态
if(!sys_rst_n)begin
uart_tx_en_d0<=1'b0;
uart_tx_en_d1<=1'b0;
end
else begin
uart_tx_en_d0<=uart_tx_en;
uart_tx_en_d1<=uart_tx_en_d0;
end
end
always @(posedge sys_clk or negedge sys_rst_n)begin//捕获到使能端的上升沿信号,拉高传输开始标志位,并在第9个数据(终止位)的传输过程正中(数据比较稳定)再将传输开始标志位拉低,标志传输结束
if(!sys_rst_n)begin
tx_flag<=1'b0;
uart_data_reg<=8'd0;
end
else if(pos_uart_en_txd)begin
uart_data_reg<=uart_data;
tx_flag<=1'b1;
end
else if((tx_cnt==4'd9) && (clk_cnt==BPS_CNT/2))begin//在第9个数据(终止位)的传输过程正中(数据比较稳定)再将传输开始标志位拉低,标志传输结束
tx_flag<=1'b0;
uart_data_reg<=8'd0;
end
else begin
uart_data_reg<=uart_data_reg;
tx_flag<=tx_flag;
end
end
always @(posedge sys_clk or negedge sys_rst_n)begin//时钟每计数一个BPS_CNT(传输一位数据所需要的时钟个数),即将数据计数器加1,并清零时钟计数器
if(!sys_rst_n)begin
clk_cnt<=16'd0;
tx_cnt <= 4'd0;
end
else if(tx_flag) begin
if(clk_cnt<BPS_CNT-1)begin
clk_cnt<=clk_cnt+1'b1;
tx_cnt <=tx_cnt;
end
else begin
clk_cnt<=16'd0;
tx_cnt <=tx_cnt+1'b1;
end
end
else begin
clk_cnt<=16'd0;
tx_cnt<= 4'd0;
end
end
always @(posedge sys_clk or negedge sys_rst_n)begin//在每个数据的传输过程正中(数据比较稳定)将数据寄存器的数据赋值给数据线
if(!sys_rst_n)
uart_txd<= 1'b1;
else if(tx_flag)
case(tx_cnt)
4'd0:uart_txd<=1'b0;
4'd1:uart_txd<=uart_data_reg[0];
4'd2:uart_txd<=uart_data_reg[1];
4'd3:uart_txd<=uart_data_reg[2];
4'd4:uart_txd<=uart_data_reg[3];
4'd5:uart_txd<=uart_data_reg[4];
4'd6:uart_txd<=uart_data_reg[5];
4'd7:uart_txd<=uart_data_reg[6];
4'd8:uart_txd<=uart_data_reg[7];
4'd9:uart_txd<=1'b1;
default:;
endcase
else
uart_txd<= 1'b1;
end
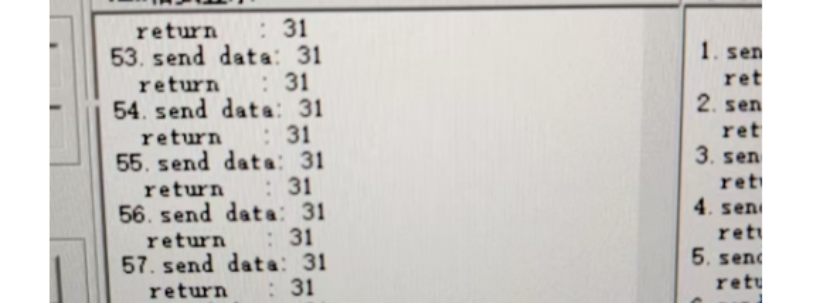
endmodule上板测试结果:每按一次按键,串口助手未收到数据。因为布线简单,所以尝试修改杜邦线插线位置后,意外成功 
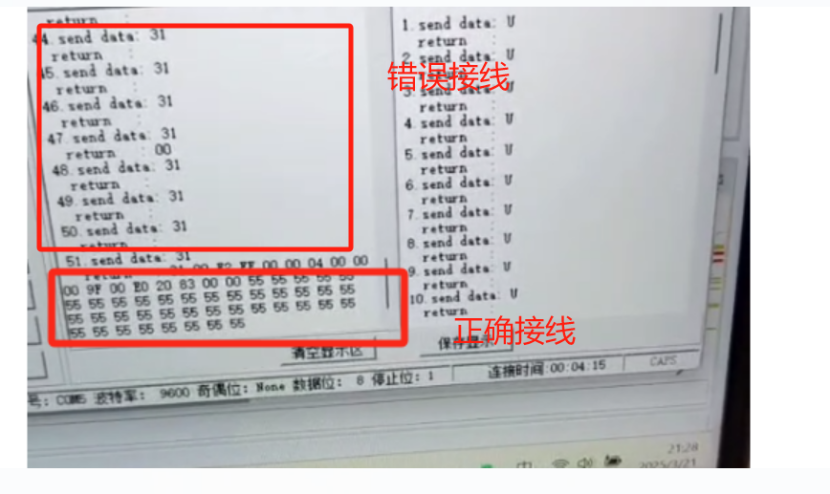
定位原因:杜邦线插错位置导致。”※“标注位置应为硬件原理图接口“1”的位置。
再测试完整的Uart程序后,发现运行无误 
上板测试完成
代码部分
接收端代码
`timescale 1ns / 1ps
//时钟频率50Mhz,所需波特率9600bps,50,000,000/9600=5208
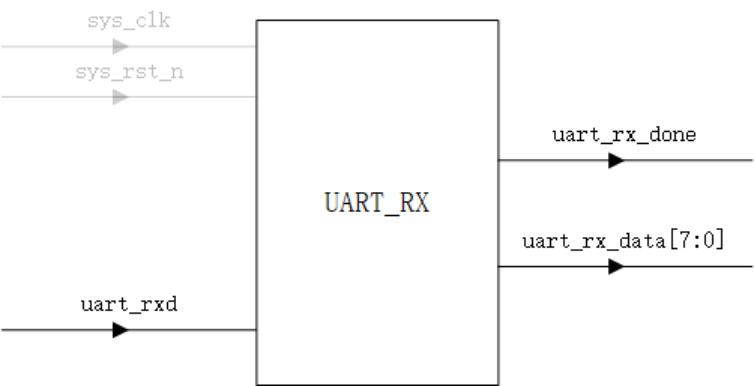
module UART_RX(
input sys_clk,//50M系统时钟
input sys_rst_n,//系统复位
input uart_rxd,//接收数据线
output reg uart_rx_done,//数据接收完成标志
output reg [7:0]uart_rx_data//接收到的数据
);
//常量化参数
parameterBand_BPS=9600;//波特率9600bps,可更改
parameterSYS_CLK_FRE=50_000_000;//50M系统时钟
localparamBand_BPS_CNT=SYS_CLK_FRE/Band_BPS;//传输一位数据所需要的时钟个数:5208。localparam的作用范围仅限于声明该常量的模块内部,不能用于模块与模块之间的参数传递
reg uart_rx_d0;//打1拍,消除亚稳态
reg uart_rx_d1;//打2拍
reg [15:0]clk_cnt;//时钟计数器
reg [3:0]rx_cnt;//接收计数器
reg rx_flag;//接收标志位
reg [7:0]uart_rx_data_reg;//数据寄存
wire neg_uart_rx_data;//数据的下降沿
assignneg_uart_rx_data = uart_rx_d1 & (~uart_rx_d0); //捕获数据线的下降沿,用来标志数据传输开始
//将数据线打两拍:
//作用1:同步不同时钟域信号,防止亚稳态;
//作用2:用以捕获下降沿
always@(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)begin
uart_rx_d0<=1'b0;
uart_rx_d1<=1'b0;
end
else begin
uart_rx_d0<=uart_rxd;//打两拍
uart_rx_d1<=uart_rx_d0;
end
end
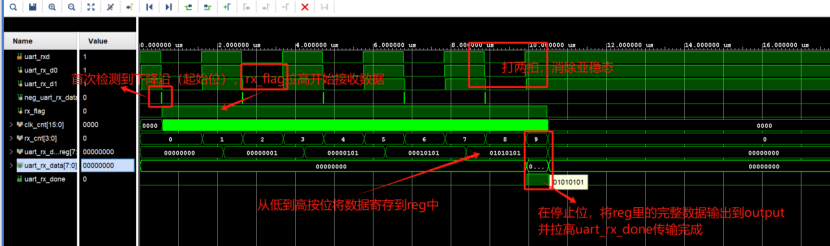
//捕获到数据下降沿(起始位0)后,拉高传输开始标志位,并在第9个数据(终止位)的传输过程正中(数据比较稳定)再将传输开始标志位拉低,标志传输结束
always@(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)
rx_flag<=1'b0;
else begin
if(neg_uart_rx_data)
rx_flag<=1'b1;
else if((rx_cnt==4'd9)&&(clk_cnt==Band_BPS_CNT/2))//在第9个数据(终止位)的传输过程正中(数据比较稳定)再将传输开始标志位拉低,标志传输结束
rx_flag<=1'b0;
else
rx_flag<=rx_flag;
end
end
//时钟每计数一个Band_BPS_CNT(传输一位数据所需要的时钟个数),即将数据计数器加1,并清零时钟计数器
always@(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)begin
rx_cnt<=4'd0;
clk_cnt<=16'd0;
end
else if(rx_flag)begin
if(clk_cnt<Band_BPS_CNT-1'b1)begin
clk_cnt<=clk_cnt+1'b1;
rx_cnt<=rx_cnt;
end
else begin
clk_cnt<=16'd0;
rx_cnt<=rx_cnt+1'b1;
end
end
else begin
rx_cnt<=4'd0;
clk_cnt<=16'd0;
end
end
//在每个数据的传输过程正中(数据比较稳定)将数据线上的数据赋值给数据寄存器
always@(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)
uart_rx_data_reg<=8'd0;
else if(rx_flag)
if(clk_cnt==Band_BPS_CNT/2) begin
case(rx_cnt)
4'd1:uart_rx_data_reg[0]<=uart_rxd;
4'd2:uart_rx_data_reg[1]<=uart_rxd;
4'd3:uart_rx_data_reg[2]<=uart_rxd;
4'd4:uart_rx_data_reg[3]<=uart_rxd;
4'd5:uart_rx_data_reg[4]<=uart_rxd;
4'd6:uart_rx_data_reg[5]<=uart_rxd;
4'd7:uart_rx_data_reg[6]<=uart_rxd;
4'd8:uart_rx_data_reg[7]<=uart_rxd;
default:;
endcase
end
else
uart_rx_data_reg<=uart_rx_data_reg;
else
uart_rx_data_reg<=8'd0;
end
//当数据传输到终止位时,拉高传输完成标志位,并将数据输出
always@(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)begin
uart_rx_done<=1'b0;
uart_rx_data<=8'd0;
end
else if(rx_cnt==4'd9)begin
uart_rx_done<=1'b1;
uart_rx_data<=uart_rx_data_reg;
end
else begin
uart_rx_done<=1'b0;
uart_rx_data<=8'd0;
end
end
endmodule接收端仿真代码
`timescale 1ns/1ns//定义时间刻度
//模块、接口定义
module uart_rx_tb();
reg sys_clk;
reg sys_rst_n;
reg uart_rxd;
wire uart_rx_done;
wire uart_rx_data;
//例化被测试的接收模块
UART_RX #(
.Band_BPS(960000),//波特率9600
.SYS_CLK_FRE(50_000_000)//时钟频率50M
)
tb_UART_RX(
.sys_clk(sys_clk),
.sys_rst_n(sys_rst_n),
.uart_rxd(uart_rxd),
.uart_rx_done(uart_rx_done),
.uart_rx_data(uart_rx_data)
);
localparamCNT=50_000_000/960000*20;//计算出传输每个时钟所需要的时间,乘20ns
initial begin//传输8位数据8'b01010101
//初始时刻定义
sys_clk<=1'b0;
sys_rst_n<=1'b0;
uart_rxd<=1'b1;
#20 //系统开始工作
sys_rst_n<=1'b1;
#(CNT/2)
uart_rxd<=1'b0;//开始传输起始位
#CNT
uart_rxd<=1'b1;//传输最低位,第1位
#CNT
uart_rxd<=1'b0;//传输第2位
#CNT
uart_rxd<=1'b1;//传输第3位
#CNT
uart_rxd<=1'b0;//传输第4位
#CNT
uart_rxd<=1'b1;//传输第5位
#CNT
uart_rxd<=1'b0;//传输第6位
#CNT
uart_rxd<=1'b1;//传输第7位
#CNT
uart_rxd<=1'b0;//传输最高位,第8位
#CNT
uart_rxd<=1'b1;//传输终止位
end
always begin
#10sys_clk=~sys_clk;//时钟20ns,50M
end
endmodule发送端代码
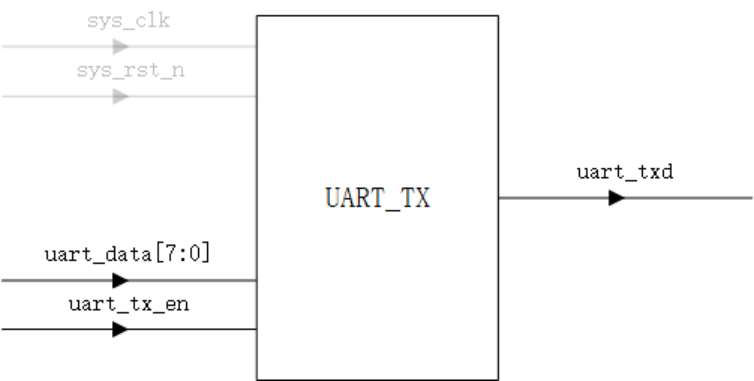
module uart_tx(
input sys_clk,//50M系统时钟
input sys_rst_n,//系统复位
input [7:0] uart_data,//发送的8位置数据
inputuart_tx_en,//发送使能信号
output reg uart_txd//串口发送数据线
);
parameter SYS_CLK_FRE=50_000_000;//50M系统时钟
parameter BPS= 9_600;//波特率9600bps,可更改
localparamBPS_CNT= SYS_CLK_FRE/BPS;//传输一位数据所需要的时钟个数
reguart_tx_en_d0;//寄存1拍
reg uart_tx_en_d1;//寄存2拍
reg tx_flag;//发送标志位
reg [7:0] uart_data_reg;//发送数据寄存器
reg [15:0] clk_cnt;//时钟计数器
reg [3:0] tx_cnt;//发送个数计数器
wire pos_uart_en_txd;//使能信号的上升沿
assign pos_uart_en_txd = uart_tx_en_d0 && (~uart_tx_en_d1);//捕捉使能端的上升沿信号,用来标志输出开始传输
always @(posedge sys_clk or negedge sys_rst_n)begin//开始传输使能信号打两拍,消除亚稳态
if(!sys_rst_n)begin
uart_tx_en_d0<=1'b0;
uart_tx_en_d1<=1'b0;
end
else begin
uart_tx_en_d0<=uart_tx_en;
uart_tx_en_d1<=uart_tx_en_d0;
end
end
always @(posedge sys_clk or negedge sys_rst_n)begin//捕获到使能端的上升沿信号,拉高传输开始标志位,并在第9个数据(终止位)的传输过程正中(数据比较稳定)再将传输开始标志位拉低,标志传输结束
if(!sys_rst_n)begin
tx_flag<=1'b0;
uart_data_reg<=8'd0;
end
else if(pos_uart_en_txd)begin
uart_data_reg<=uart_data;
tx_flag<=1'b1;
end
else if((tx_cnt==4'd9) && (clk_cnt==BPS_CNT/2))begin//在第9个数据(终止位)的传输过程正中(数据比较稳定)再将传输开始标志位拉低,标志传输结束
tx_flag<=1'b0;
uart_data_reg<=8'd0;
end
else begin
uart_data_reg<=uart_data_reg;
tx_flag<=tx_flag;
end
end
always @(posedge sys_clk or negedge sys_rst_n)begin//时钟每计数一个BPS_CNT(传输一位数据所需要的时钟个数),即将数据计数器加1,并清零时钟计数器
if(!sys_rst_n)begin
clk_cnt<=16'd0;
tx_cnt <= 4'd0;
end
else if(tx_flag) begin
if(clk_cnt<BPS_CNT-1)begin
clk_cnt<=clk_cnt+1'b1;
tx_cnt <=tx_cnt;
end
else begin
clk_cnt<=16'd0;
tx_cnt <=tx_cnt+1'b1;
end
end
else begin
clk_cnt<=16'd0;
tx_cnt<= 4'd0;
end
end
always @(posedge sys_clk or negedge sys_rst_n)begin//在每个数据的传输过程正中(数据比较稳定)将数据寄存器的数据赋值给数据线
if(!sys_rst_n)
uart_txd<= 1'b1;
else if(tx_flag)
case(tx_cnt)
4'd0:uart_txd<=1'b0;
4'd1:uart_txd<=uart_data_reg[0];
4'd2:uart_txd<=uart_data_reg[1];
4'd3:uart_txd<=uart_data_reg[2];
4'd4:uart_txd<=uart_data_reg[3];
4'd5:uart_txd<=uart_data_reg[4];
4'd6:uart_txd<=uart_data_reg[5];
4'd7:uart_txd<=uart_data_reg[6];
4'd8:uart_txd<=uart_data_reg[7];
4'd9:uart_txd<=1'b1;
default:;
endcase
else
uart_txd<= 1'b1;
end
endmodule发送端仿真代码
`timescale 1ns/1ns//定义时间刻度
//模块、接口定义
module tb_uart_tx();
reg sys_clk;
reg sys_rst_n;
reg [7:0]uart_data;
reg uart_tx_en;
wire uart_txd;
//例化被测试的接收模块
uart_tx #(
.BPS(960000),//波特率9600
.SYS_CLK_FRE(50_000_000)//时钟频率50M
)
u_uart_tx(
.sys_clk(sys_clk),
.sys_rst_n(sys_rst_n),
.uart_data(uart_data),
.uart_tx_en(uart_tx_en),
.uart_txd(uart_txd)
);
localparamCNT =50_000_000/960000*20;//计算出传输每个时钟所需要的时间
initial begin//传输8位数据8'b01010101
sys_clk<=1'b0;//初始时刻定义
sys_rst_n<=1'b0;
uart_tx_en<=1'b0;
uart_data<=8'b01010101;//发送数据 01010101
#20 //系统开始工作
sys_rst_n <=1'b1;
#(CNT/2)
uart_tx_en<=1'b1;
#20
uart_tx_en<=1'b0;
end
always begin
#10sys_clk = ~sys_clk;//时钟20ns,50M
end
endmoduletop顶层代码
module uart_top(
input sys_clk,//系统时钟
input sys_rst_n,//系统复位
input uart_rxd,//接收端口
output uart_txd//发送端口
);
parameterUART_BPS= 9_600;//波特率
parameterCLK_FREQ=50_000_000;//系统频率50M
wireuart_en_w;
wire [7:0] uart_data_w;
uart_tx#(//例化发送模块
.BPS (UART_BPS),
.SYS_CLK_FRE(CLK_FREQ)
)
u_uart_tx(
.sys_clk(sys_clk),
.sys_rst_n (sys_rst_n),
.uart_tx_en(uart_en_w),
.uart_data (uart_data_w),
.uart_txd (uart_txd)
);
uart_rx #(//例化接收模块
.BPS(UART_BPS),
.SYS_CLK_FRE(CLK_FREQ)
)
u_uart_rx(
.sys_clk(sys_clk),
.sys_rst_n (sys_rst_n),
.uart_rxd (uart_rxd),
.uart_rx_done (uart_en_w),
.uart_rx_data (uart_data_w)
);
endmoduletop顶层仿真代码
`timescale 1ns/1ns//定义时间刻度
module tb_uart_top();//模块、接口定义
reg sys_clk;
reg sys_rst_n;
reg uart_rxd;
wire uart_txd;
uart_top #(//例化被测试的接收模块
.UART_BPS(960000),//波特率9600
.CLK_FREQ(50_000_000)//时钟频率50M
)
u_uart_top(
.sys_clk(sys_clk),
.sys_rst_n(sys_rst_n),
.uart_rxd(uart_rxd),
.uart_txd(uart_txd)
);
localparamCNT=50_000_000/960000*20;//计算出传输每个时钟所需要的时间
initial begin//传输8位数据8'b01010101
sys_clk<=1'b0;//初始时刻定义
sys_rst_n<=1'b0;
uart_rxd<=1'b1;
#20 //系统开始工作
sys_rst_n<=1'b1;
#(CNT/2)
uart_rxd<=1'b0;//开始传输起始位
#CNT
uart_rxd<=1'b1;//传输最低位,第1位
#CNT
uart_rxd<=1'b0;//传输第2位
#CNT
uart_rxd<=1'b1;//传输第3位
#CNT
uart_rxd<=1'b0;//传输第4位
#CNT
uart_rxd<=1'b1;//传输第5位
#CNT
uart_rxd<=1'b0;//传输第6位
#CNT
uart_rxd<=1'b1;//传输第7位
#CNT
uart_rxd<=1'b0;//传输最高位,第8位
#CNT
uart_rxd<=1'b1;//传输终止位
end
always begin
#10sys_clk = ~sys_clk;//时钟20ns,50M
end
endmodule贡献者
 dz13718198068
dz13718198068