一、概述
字数
5066 字
阅读时间
24 分钟
编写一个自定义的 AXI-Lite-Slave GPIO IP,并且用编写的 AXI-Lite-Master IP 对齐进行仿真验证和上板验证。
实验目的:
1:修改 VIVADO 产生的 saxi-lite- gpio 模板,增加 GPIO 的定义 2:修改 VIVADO 产生的 maxi-lite-gpio 模板,增加对 saxi-lite- gpio 寄存器的读写操作。 3:进一步掌握基于 vivado 实现的 ip 的封装
二、基于 VIVADO 的 IP 封装
2.1、封装 maxi_lite_gpio IP
放好代码 
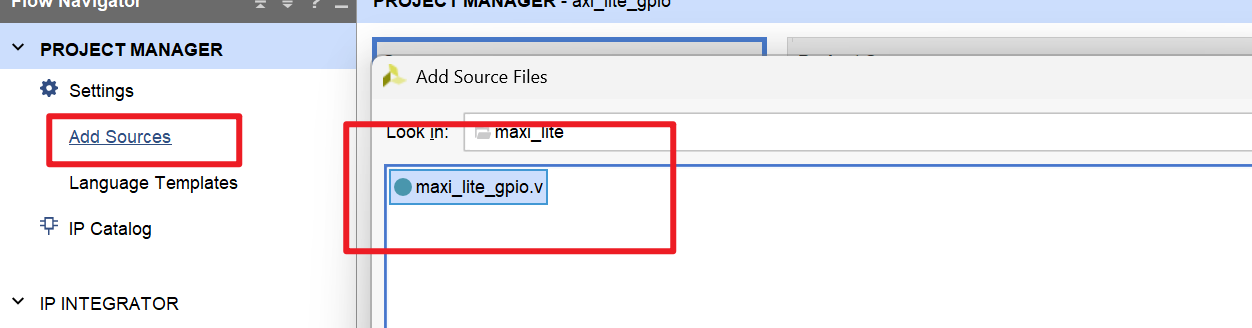
 创建空工程 添加ip源码,maxi_lite_gpio
创建空工程 添加ip源码,maxi_lite_gpio 
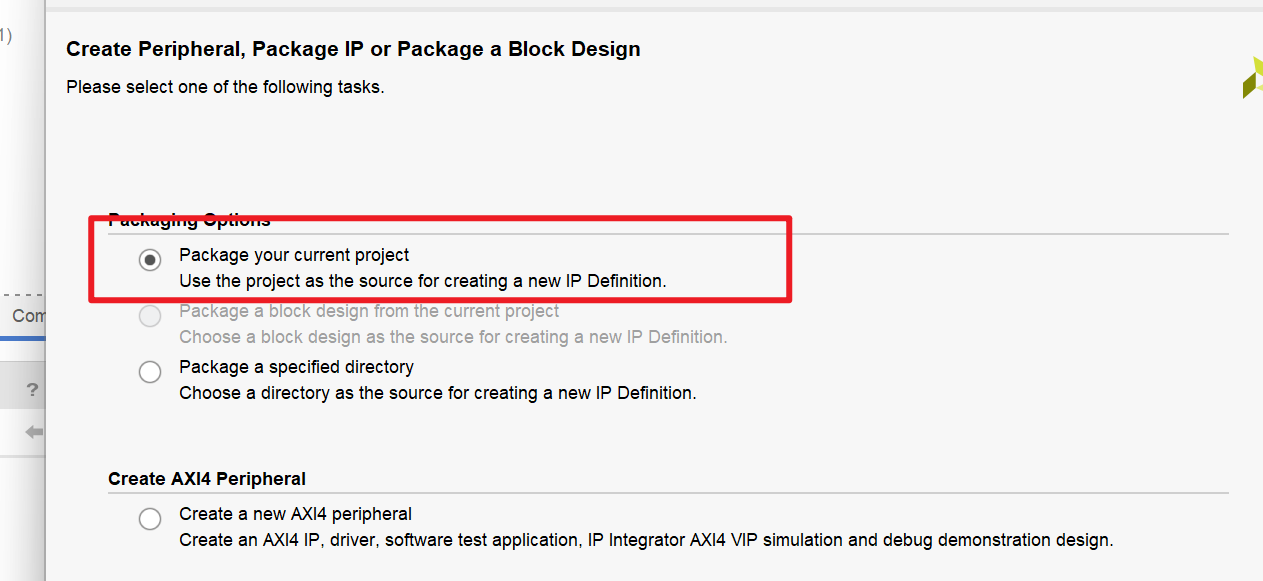
 创建ip tools 菜单中找到 Create and Package New IP。 这次选package your current project!!!
创建ip tools 菜单中找到 Create and Package New IP。 这次选package your current project!!! 
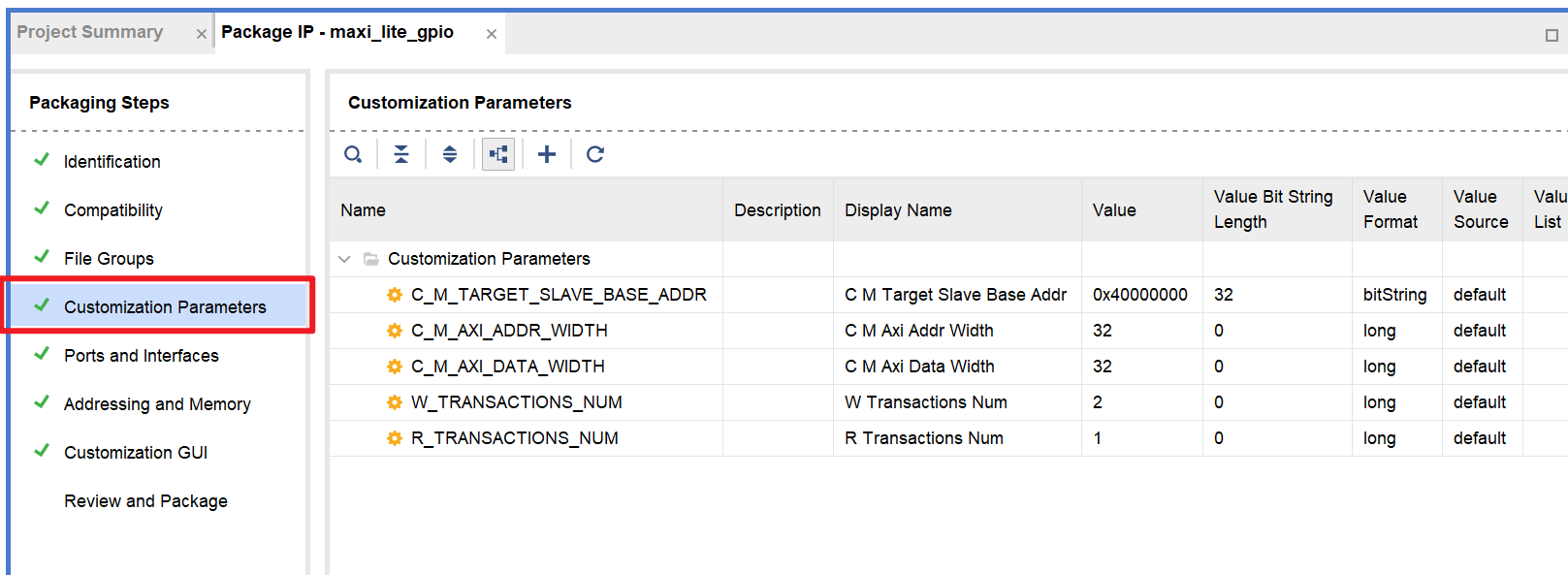
新增 IP 编辑窗口 
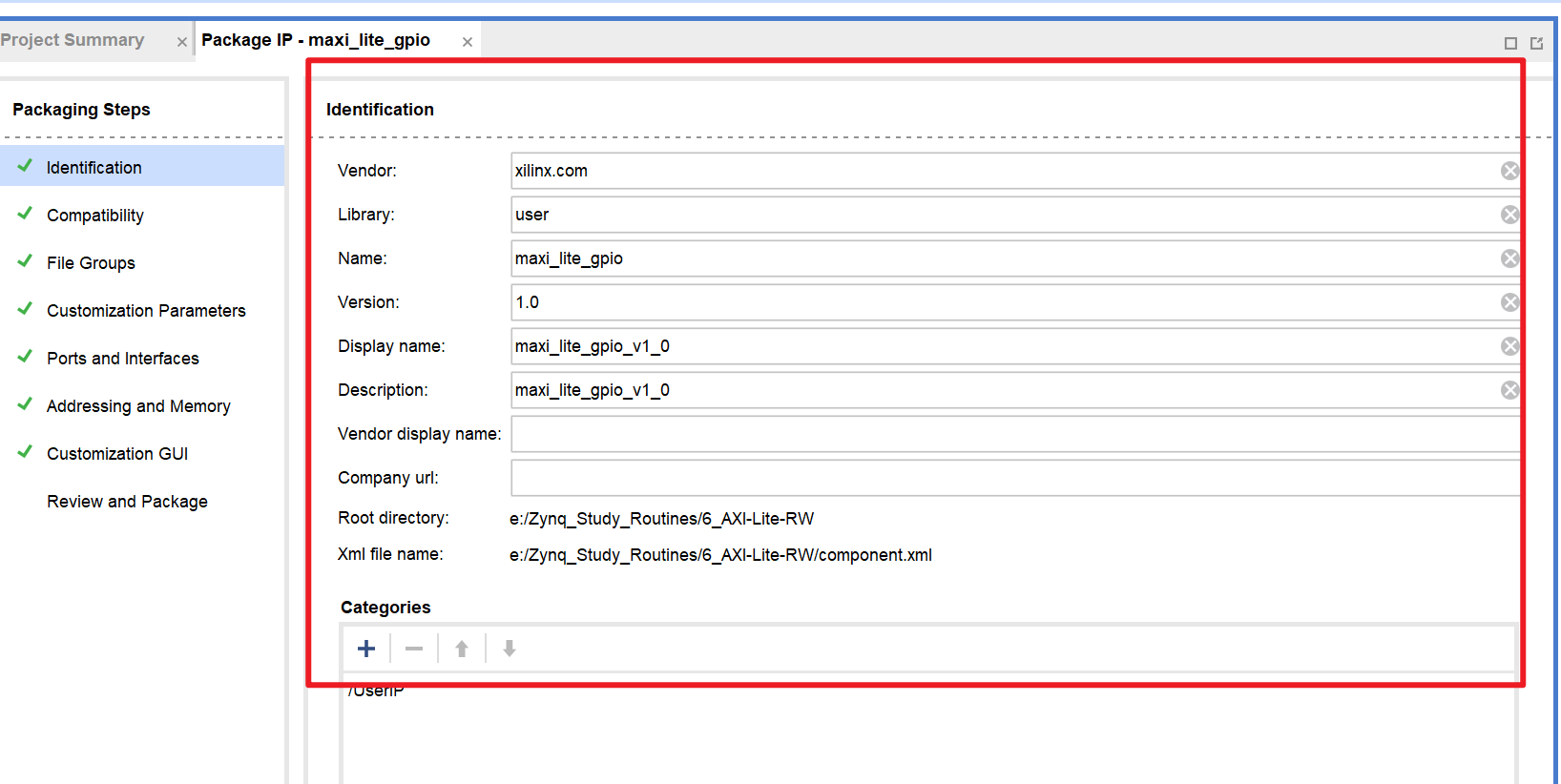
参数接口 
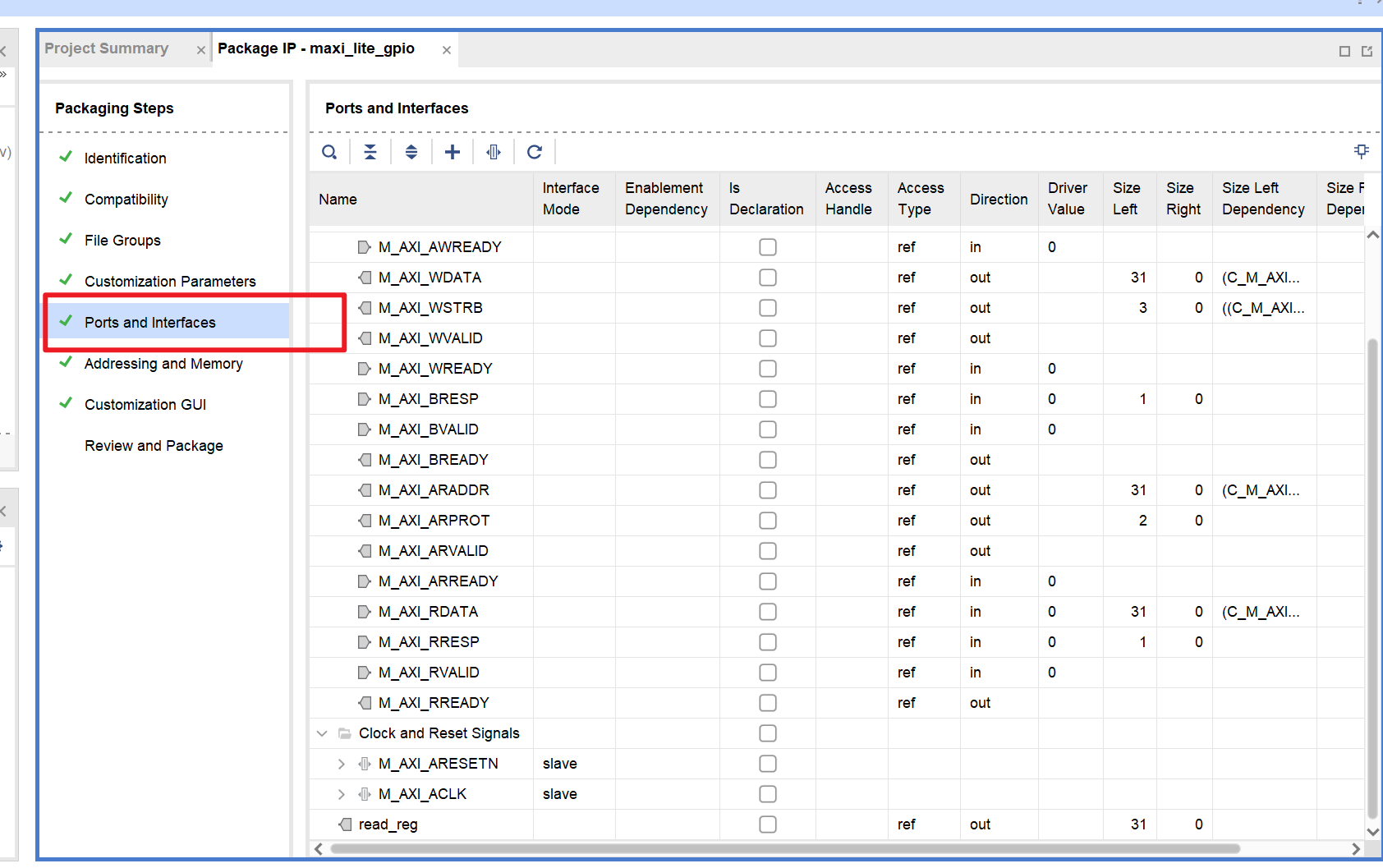
信号接口 
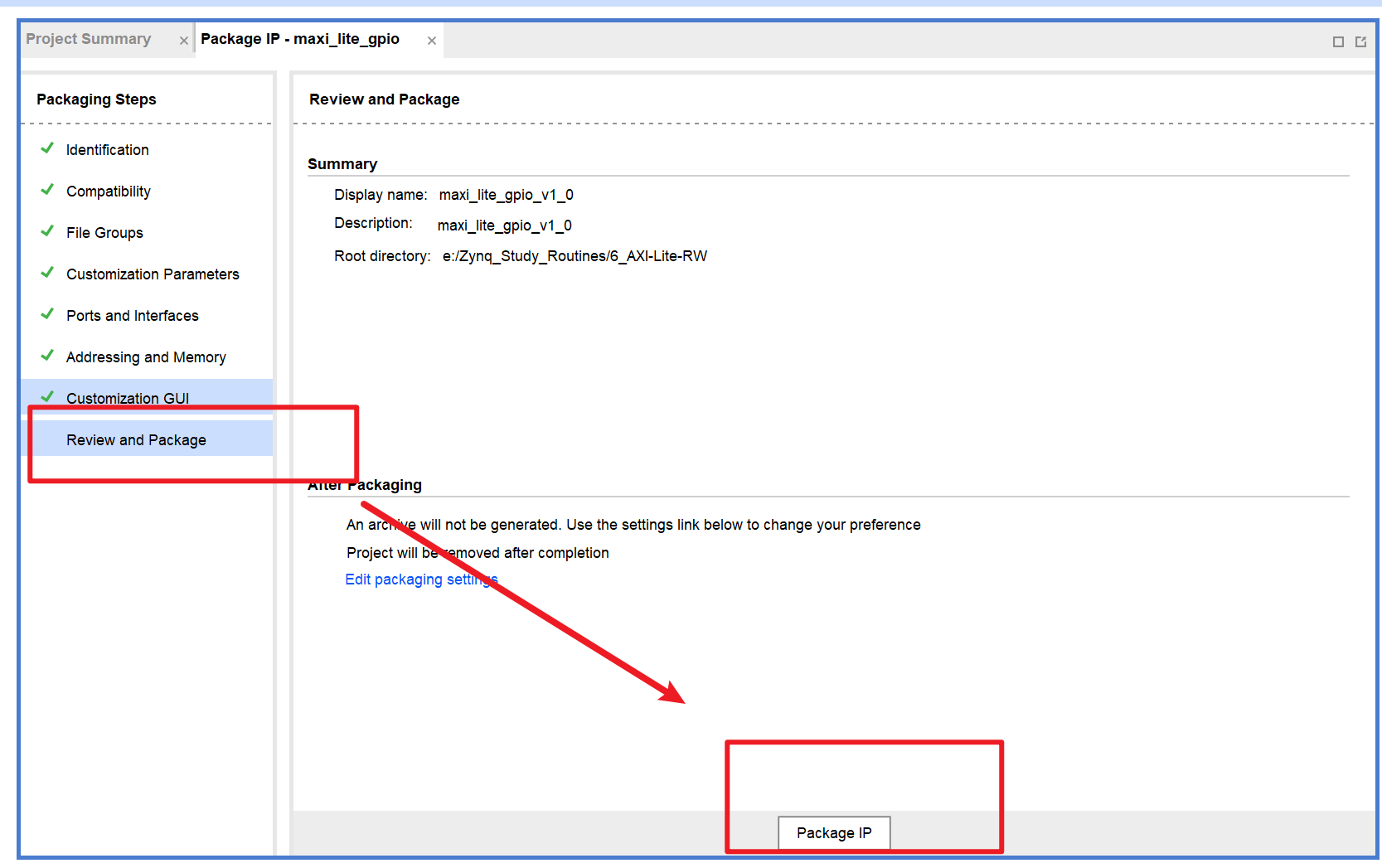
完成ip打包 
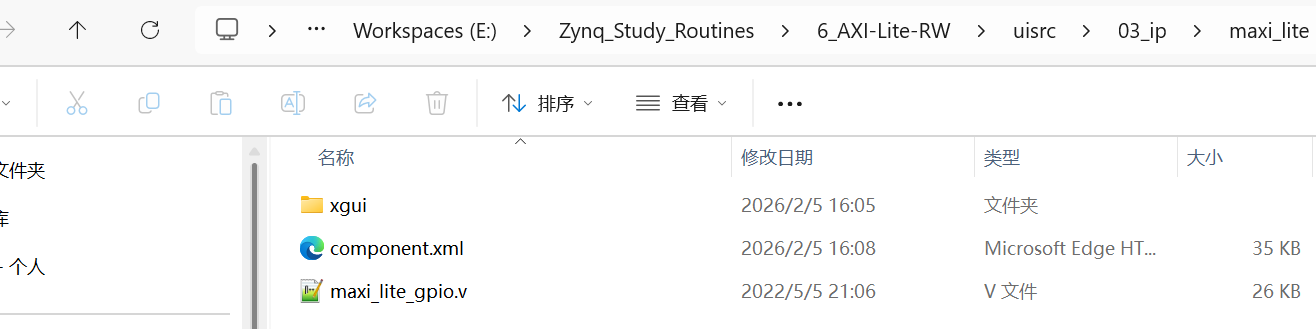
 打包完的文件如下
打包完的文件如下 
2.1、封装 saxi_lite_gpio IP
同上(略) 两个ip核已经就绪 
三、FPGA 图形化编程
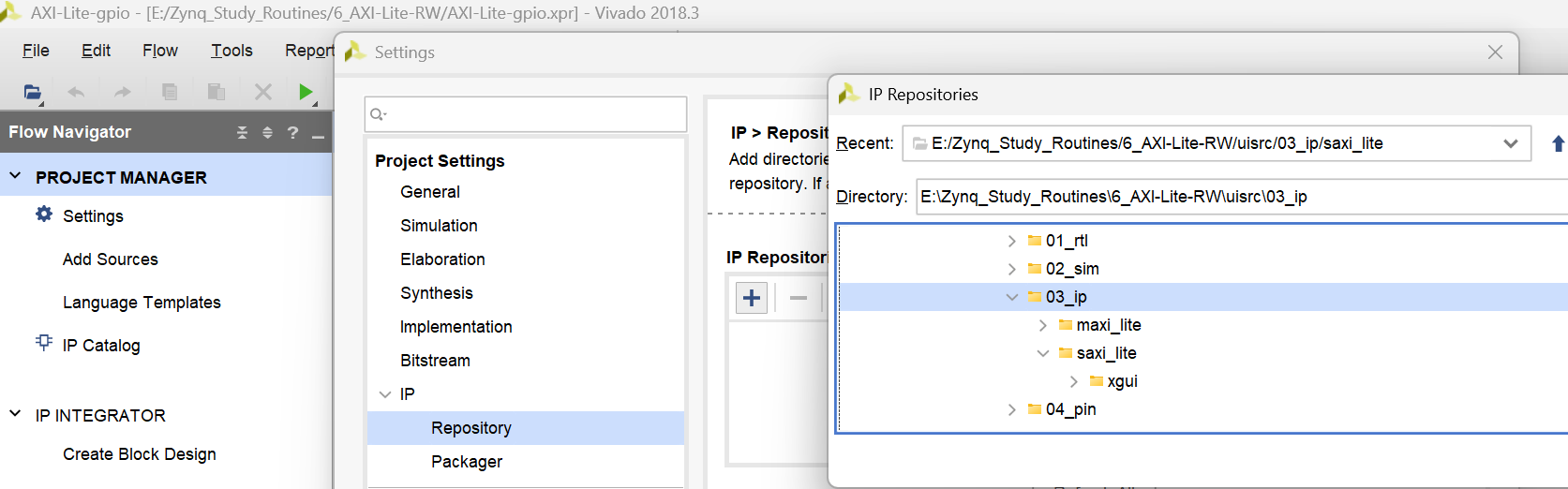
设置 IP 路径 
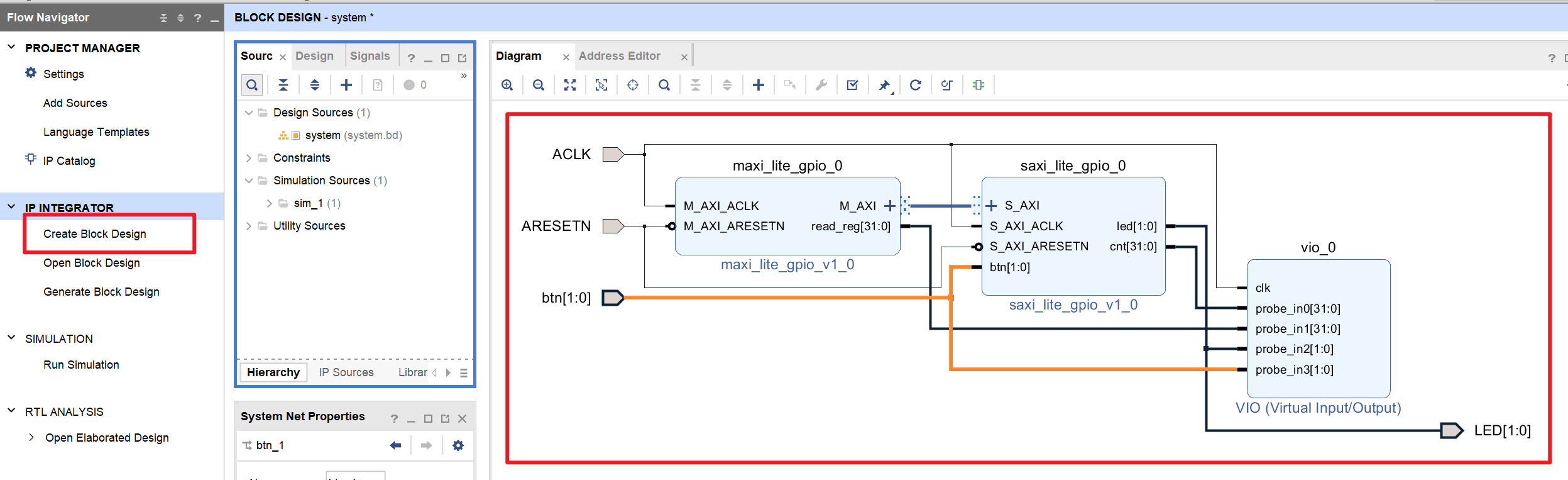
创建 BD 工程 添加以上完成的 maxi_lite_gpio 和 saxi_lite_gpio 两个 IP, 添加虚拟 IO 用于观察数据 完成连线 
编写顶层代码,给个复位信号
verilog
module system_wrapper
(
input sysclk, // 系统时钟
input [1:0] btn, // 按键输入
output [1:0] led // LED输出
);
// 异步复位释放信号
wire ARESETN;
// 复位计数器,初始值0
reg [7:0] rstn_cnt = 8'd0;
// 复位计数器逻辑:计数至最高位为1时停止
always @(posedge sysclk) begin
if (rstn_cnt[7] == 1'b0) begin
rstn_cnt <= rstn_cnt + 1'b1;
end
end
// 复位释放信号赋值
assign ARESETN = rstn_cnt[7];
// 例化系统核心模块
system system_i
(
.sysclk (sysclk),
.ARESETN (rstn_cnt[7]),
.btn (btn),
.led (led)
);
endmodule添加个仿真代码
verilog
module axi_top_sim();
reg sysclk;
wire [1:0] btn = 2'b01;
wire [1:0] led;
system_wrapper system_wrapper_inst
(
.sysclk(sysclk),
.btn(btn),
.led(led)
);
initial begin
sysclk = 1'b0;
#100;
end
always begin
#5 sysclk = ~sysclk;
end
endmodule四、代码分析
maxi_lite_gpio 代码注释 + 整体分析
verilog
`timescale 1 ns / 1 ps
module maxi_lite_gpio #
(
// 从设备基地址(需与硬件中Slave地址匹配)
parameter C_M_TARGET_SLAVE_BASE_ADDR = 32'h40000000,
parameter integer C_M_AXI_ADDR_WIDTH = 32, // AXI地址位宽
parameter integer C_M_AXI_DATA_WIDTH = 32, // AXI数据位宽
parameter integer W_TRANSACTIONS_NUM = 2, // 单次写事务数:连续写2个地址
parameter integer R_TRANSACTIONS_NUM = 1 // 单次读事务数:连续读1个地址
)
(
// 全局时钟/复位(低电平有效,匹配AXI标准)
input wire M_AXI_ACLK,
input wire M_AXI_ARESETN,
// AXI-Lite 写地址通道信号
output wire [C_M_AXI_ADDR_WIDTH-1 : 0] M_AXI_AWADDR,
output wire [2 : 0] M_AXI_AWPROT,
output wire M_AXI_AWVALID,
input wire M_AXI_AWREADY,
// AXI-Lite 写数据通道信号
output wire [C_M_AXI_DATA_WIDTH-1 : 0] M_AXI_WDATA,
output wire [C_M_AXI_DATA_WIDTH/8-1 : 0] M_AXI_WSTRB,
output wire M_AXI_WVALID,
input wire M_AXI_WREADY,
// AXI-Lite 写响应通道信号
input wire [1 : 0] M_AXI_BRESP,
input wire M_AXI_BVALID,
output wire M_AXI_BREADY,
// AXI-Lite 读地址通道信号
output wire [C_M_AXI_ADDR_WIDTH-1 : 0] M_AXI_ARADDR,
output wire [2 : 0] M_AXI_ARPROT,
output wire M_AXI_ARVALID,
input wire M_AXI_ARREADY,
// AXI-Lite 读数据/响应通道信号
input wire [C_M_AXI_DATA_WIDTH-1 : 0] M_AXI_RDATA,
input wire [1 : 0] M_AXI_RRESP,
input wire M_AXI_RVALID,
output wire M_AXI_RREADY,
// 读数据缓存寄存器(输出到外部,可观测从设备数据)
output reg [31:0]read_reg
);
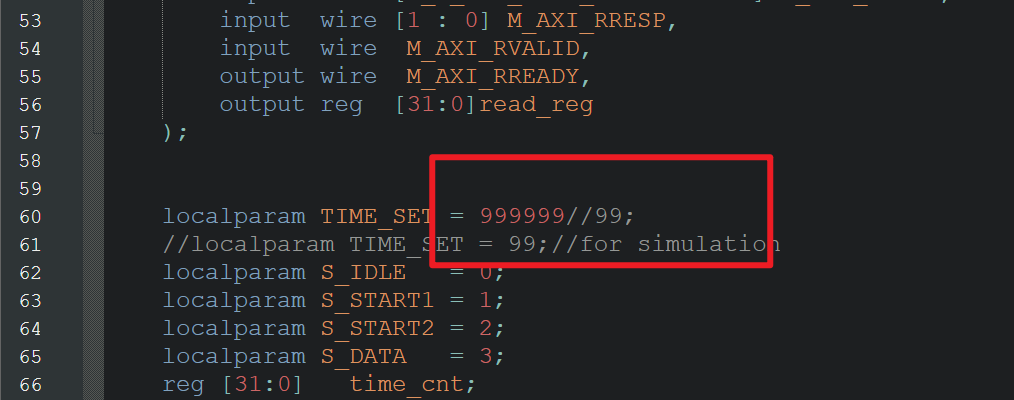
// 定时计数器阈值:实际硬件99999999(约500ms,依时钟频率),仿真可改小
localparam TIME_SET = 99999999;
//localparam TIME_SET = 99;//for simulation
// 状态机定义:IDLE(空闲)、START1/2(复位内部信号)、DATA(读写事务执行)
localparam S_IDLE = 0;
localparam S_START1 = 1;
localparam S_START2 = 2;
localparam S_DATA = 3;
reg [31:0] time_cnt; // 全局定时计数器:达到阈值触发一次读写事务
// 1. 全局定时计数器:循环计数,达到TIME_SET触发读写
always @ ( posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 1'b0)
time_cnt <= 0;
else if(time_cnt < TIME_SET)
time_cnt <= time_cnt + 1'b1;
else
time_cnt <= 0;
end
// 辅助函数:计算位宽(用于生成读写索引的位宽,避免冗余)
function integer clogb2 (input integer bit_depth);begin
for(clogb2=0; bit_depth>0; clogb2=clogb2+1)
bit_depth = bit_depth >> 1;
end
endfunction
// 写事务内部寄存器定义
localparam integer WRITE_NUM_BITS = clogb2(W_TRANSACTIONS_NUM-1);
reg axi_awvalid; // 内部写地址有效信号
reg [C_M_AXI_ADDR_WIDTH-1 : 0] axi_awaddr; // 内部写地址(偏移量)
reg axi_wvalid; // 内部写数据有效信号
reg [C_M_AXI_DATA_WIDTH-1 : 0] axi_wdata; // 内部写数据
reg axi_bready; // 内部写响应准备信号
reg start_single_write; // 单次写事务启动信号
wire write_resp_error; // 写响应错误标志
reg writes_done; // 单次所有写事务完成标志
reg [WRITE_NUM_BITS : 0] write_index; // 写事务索引(0~1,对应2次写)
reg wstart; // 写状态机启动标志(复位内部写信号)
reg [31:0] wcnt_reg; // 写次数计数器(记录已完成的写事务总次数)
reg [1 :0] led_reg; // LED控制寄存器(生成2位翻转数据,写入从设备控制LED)
// AXI-Lite 写通道信号映射到外部端口
assign M_AXI_AWADDR = C_M_TARGET_SLAVE_BASE_ADDR + axi_awaddr; // 实际写地址=基地址+偏移
assign M_AXI_WDATA = axi_wdata;
assign M_AXI_AWPROT = 3'b000; // 保护信号:普通访问(AXI标准,无特殊保护)
assign M_AXI_AWVALID = axi_awvalid;
assign M_AXI_WVALID = axi_wvalid;
assign M_AXI_WSTRB = 4'b1111; // 写选通:32位全写(1位对应1字节,4字节=32位)
assign M_AXI_BREADY = axi_bready;
assign write_resp_error = (axi_bready & M_AXI_BVALID & M_AXI_BRESP[1]); // 写错误:响应位1为1
// 2. AXI-Lite 写地址通道控制:生成AWVALID,与Slave的AWREADY握手
always @(posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 0 || wstart == 1)begin
axi_awvalid <= 1'b0;
end else begin
if (start_single_write)begin
axi_awvalid <= 1'b1;
end else if (M_AXI_AWREADY && axi_awvalid)begin // 握手成功,拉低有效信号
axi_awvalid <= 1'b0;
end
end
end
// 写事务锁定信号:防止单次写事务中重复启动
reg axi_wlocked ;
always @(posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 0 || wstart == 1)begin
axi_wlocked <= 1'b0;
end else begin
if (start_single_write)begin
axi_wlocked <= 1'b1;
end else if (axi_bready & M_AXI_BVALID)begin // 写响应完成,解锁
axi_wlocked <= 1'b0;
end
end
end
// 写地址偏移量控制:每次写握手成功,地址+4(32位对齐,AXI标准)
always @(posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 0 || wstart == 1)begin
axi_awaddr <= 0;
end else if (M_AXI_AWREADY && axi_awvalid)begin
axi_awaddr <= axi_awaddr + 32'h00000004;
end
end
// 3. AXI-Lite 写数据通道控制:生成WVALID,与Slave的WREADY握手
always @(posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 0 || wstart == 1)begin
axi_wvalid <= 1'b0;
end else if (start_single_write)begin
axi_wvalid <= 1'b1;
end else if (M_AXI_WREADY && axi_wvalid) begin // 握手成功,拉低有效信号
axi_wvalid <= 1'b0;
end
end
// LED数据生成:定时计数器达到阈值,2位数据翻转(用于控制LED闪烁)
always @(posedge M_AXI_ACLK) begin
if (M_AXI_ARESETN == 0)begin
led_reg <= 2'b01;
end else if (time_cnt== TIME_SET)begin
led_reg <= {led_reg[0],led_reg[1]}; // 位翻转:01→10→01...
end
end
// 写数据生成:根据写索引生成不同数据
always @(posedge M_AXI_ACLK) begin
if (M_AXI_ARESETN == 0 || wstart == 1)begin
axi_wdata <= 0;
end else if (start_single_write)begin
if(write_index == 0)
axi_wdata <= {30'd0,led_reg}; // 第1次写:低2位是LED控制数据,高30位0
else if(write_index == 1)
axi_wdata <= wcnt_reg; // 第2次写:写事务总次数
end
end
// 写索引控制:每次写数据握手成功,索引+1(记录当前是第几次写)
always @(posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 0 || wstart == 1)begin
write_index <= 0;
end else if (M_AXI_WREADY && axi_wvalid)begin
write_index <= write_index + 1;
end
end
// 写响应通道控制:生成BREADY,与Slave的BVALID握手
always @(posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 0 || wstart == 1)begin
axi_bready <= 1'b0;
end else if (M_AXI_BVALID && ~axi_bready)begin // 收到响应,置1准备接收
axi_bready <= 1'b1;
end else if (axi_bready)begin // 握手完成,置0
axi_bready <= 1'b0;
end else
axi_bready <= axi_bready;
end
// 单次写事务完成标志:所有写次数完成且收到最后一个写响应
always @(posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 0 || wstart == 1)
writes_done <= 1'b0;
else if (M_AXI_BVALID && axi_bready && write_index == W_TRANSACTIONS_NUM)
writes_done <= 1'b1;
else
writes_done <= writes_done;
end
// 写完成标志打拍(消除亚稳态,工程常用技巧)
reg writes_done_r;
always @ ( posedge M_AXI_ACLK)
writes_done_r <= writes_done;
// 写总次数计数器:每完成一次单次写事务(2次写),计数+1
always @ ( posedge M_AXI_ACLK)
if (M_AXI_ARESETN == 1'b0)begin
wcnt_reg <= 0;
end else if(writes_done_r == 0 && writes_done == 1) // 检测上升沿,避免重复计数
wcnt_reg <= wcnt_reg + 1'b1;
// 4. 写事务状态机:控制单次写事务的启动、执行、完成
reg [1:0] AXI_WS;
always @ ( posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 1'b0)begin
AXI_WS <= S_IDLE;
wstart <= 1'b0;
start_single_write <= 1'b0;
end else begin
case (AXI_WS)
S_IDLE:begin // 空闲:定时计数器达到阈值,启动写事务
start_single_write <= 1'b0;
if ( time_cnt == TIME_SET ) begin
AXI_WS <= S_START1;
end else begin
AXI_WS <= S_IDLE;
end
end
S_START1:begin // 启动1:置位wstart,复位内部写信号
wstart <= 1'b1;
AXI_WS <= S_START2;
end
S_START2:begin // 启动2:拉低wstart,进入数据写阶段
wstart <= 1'b0;
AXI_WS <= S_DATA;
end
S_DATA: // 数据写:循环执行指定次数写事务,完成后回到空闲
if(write_index < W_TRANSACTIONS_NUM ) begin
if (~axi_wlocked && ~start_single_write)begin
start_single_write <= 1'b1; // 启动单次写(地址+数据)
end else begin
start_single_write <= 1'b0; // 拉低生成脉冲,避免重复启动
end
end else if (writes_done)begin
AXI_WS <= S_IDLE;
end
default :begin
AXI_WS <= S_IDLE;
end
endcase
end
end
// ------------------- AXI-Lite 读事务逻辑(与写事务结构完全对称)-------------------
localparam integer READ_NUM_BITS = clogb2(R_TRANSACTIONS_NUM-1);
reg axi_arvalid; // 内部读地址有效信号
reg [C_M_AXI_ADDR_WIDTH-1 : 0] axi_araddr; // 内部读地址(偏移量)
reg axi_rready; // 内部读数据准备信号
reg start_single_read; // 单次读事务启动信号
reg reads_done; // 单次所有读事务完成标志
reg [READ_NUM_BITS : 0] read_index; // 读事务索引(0,对应1次读)
reg rstart; // 读状态机启动标志(复位内部读信号)
// AXI-Lite 读通道信号映射到外部端口
assign M_AXI_ARADDR = C_M_TARGET_SLAVE_BASE_ADDR + axi_araddr; // 实际读地址=基地址+偏移
assign M_AXI_ARVALID = axi_arvalid;
assign M_AXI_ARPROT = 3'b001; // 保护信号:普通读访问
assign M_AXI_RREADY = axi_rready;
assign read_resp_error = (axi_rready & M_AXI_RVALID & M_AXI_RRESP[1]); // 读响应错误标志
// 5. AXI-Lite 读地址通道控制:生成ARVALID,与Slave的ARREADY握手
always @(posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 0 || rstart == 1'b1)begin
axi_arvalid <= 1'b0;
end else if (start_single_read)begin
axi_arvalid <= 1'b1;
end else if (M_AXI_ARREADY && axi_arvalid)begin // 握手成功,拉低有效信号
axi_arvalid <= 1'b0;
end
end
// 读事务锁定信号:防止单次读事务中重复启动
reg axi_rlocked ;
always @(posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 0 || rstart == 1)begin
axi_rlocked <= 1'b0;
end else begin
if (start_single_read)begin
axi_rlocked <= 1'b1;
end else if (M_AXI_RVALID && axi_rready)begin // 读数据完成,解锁
axi_rlocked <= 1'b0;
end
end
end
// 读地址偏移量控制:每次读握手成功,地址+4(32位对齐)
always @(posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 0 || rstart == 1'b1)begin
axi_araddr <= 0;
end else if (M_AXI_ARREADY && axi_arvalid)begin
axi_araddr <= axi_araddr + 32'h00000004;
end
end
// 读数据/响应通道控制:生成RREADY,与Slave的RVALID握手
always @(posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 0 || rstart == 1'b1)begin
axi_rready <= 1'b0;
end else if (M_AXI_RVALID && ~axi_rready)begin
axi_rready <= 1'b1;
end else if (axi_rready)begin
axi_rready <= 1'b0;
end
end
// 6. 读数据缓存:将从设备返回的RDATA存入read_reg(外部可观测)
always @(posedge M_AXI_ACLK) begin
if (M_AXI_ARESETN == 0 || rstart == 1'b1)
read_reg <= 0;
else if (M_AXI_RVALID && axi_rready) // 读握手成功,锁存数据
read_reg <= M_AXI_RDATA;
end
// 读索引控制:每次读数据握手成功,索引+1
always @(posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 0 || rstart == 1'b1)begin
read_index <= 0;
end else if (M_AXI_RVALID && axi_rready)begin
read_index <= read_index + 1;
end
end
// 单次读事务完成标志:所有读次数完成且收到最后一个读响应
// 【注:原代码笔误,write_index→应改为read_index,不影响当前1次读,多此读需修改】
always @(posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 0 || rstart == 1)
reads_done <= 1'b0;
else if (M_AXI_RVALID && axi_rready && write_index == R_TRANSACTIONS_NUM)
reads_done <= 1'b1;
else
reads_done <= reads_done;
end
// 7. 读事务状态机:控制单次读事务的启动、执行、完成(与写状态机逻辑完全一致)
reg [1:0] AXI_RS;
always @ ( posedge M_AXI_ACLK)begin
if (M_AXI_ARESETN == 1'b0)begin
AXI_RS <= S_IDLE;
rstart <= 1'b0;
start_single_read <= 1'b0;
end else begin
case (AXI_RS)
S_IDLE:begin
start_single_read <= 1'b0;
if ( time_cnt == TIME_SET ) begin // 定时计数器达到阈值,启动读事务
AXI_RS <= S_START1;
end else begin
AXI_RS <= S_IDLE;
end
end
S_START1:begin
rstart <= 1'b1;
AXI_RS <= S_START2;
end
S_START2:begin
rstart <= 1'b0;
AXI_RS <= S_DATA;
end
S_DATA:
if(read_index < R_TRANSACTIONS_NUM) begin
if (~axi_rlocked && ~start_single_read)begin
start_single_read <= 1'b1;
end else begin
start_single_read <= 1'b0; // 拉低生成脉冲,避免重复启动
end
end else if (reads_done)begin
AXI_RS <= S_IDLE;
end
default :begin
AXI_RS <= S_IDLE;
end
endcase
end
end
endmodulesaxi_lite_gpio 代码注释 + 整体分析
verilog
`timescale 1 ns / 1 ps
module saxi_lite_gpio #
(
parameter integer C_S_AXI_DATA_WIDTH = 32, // AXI-Lite数据位宽(固定32位)
parameter integer C_S_AXI_ADDR_WIDTH = 4 // AXI-Lite地址位宽(4位,寻址16字节)
)
(
// 全局时钟/复位(低电平有效,AXI标准,与主设备一致)
input wire S_AXI_ACLK,
input wire S_AXI_ARESETN,
// AXI-Lite 写地址通道(主→从)
input wire [C_S_AXI_ADDR_WIDTH-1 : 0] S_AXI_AWADDR, // 写地址
input wire [2 : 0] S_AXI_AWPROT, // 保护信号(从设备忽略,仅做接口)
input wire S_AXI_AWVALID, // 写地址有效
output wire S_AXI_AWREADY, // 写地址准备好(从→主,握手信号)
// AXI-Lite 写数据通道(主→从)
input wire [C_S_AXI_DATA_WIDTH-1 : 0] S_AXI_WDATA, // 写数据
input wire [(C_S_AXI_DATA_WIDTH/8)-1 : 0] S_AXI_WSTRB, // 写字节选通(4位,对应32位4字节)
input wire S_AXI_WVALID, // 写数据有效
output wire S_AXI_WREADY, // 写数据准备好(从→主,握手信号)
// AXI-Lite 写响应通道(从→主)
output wire [1 : 0] S_AXI_BRESP, // 写响应(00=成功,其他=错误)
output wire S_AXI_BVALID, // 写响应有效
input wire S_AXI_BREADY, // 主设备准备接收响应
// AXI-Lite 读地址通道(主→从)
input wire [C_S_AXI_ADDR_WIDTH-1 : 0] S_AXI_ARADDR, // 读地址
input wire [2 : 0] S_AXI_ARPROT, // 保护信号(从设备忽略)
input wire S_AXI_ARVALID, // 读地址有效
output wire S_AXI_ARREADY, // 读地址准备好(从→主,握手信号)
// AXI-Lite 读数据/响应通道(从→主)
output wire [C_S_AXI_DATA_WIDTH-1 : 0] S_AXI_RDATA, // 读数据
output wire [1 : 0] S_AXI_RRESP, // 读响应(00=成功)
output wire S_AXI_RVALID, // 读数据有效
input wire S_AXI_RREADY, // 主设备准备接收读数据
// GPIO实际外设接口(与硬件/外部模块交互)
input wire [1 : 0] btn, // 2位按键输入(外部硬件)
output wire [1 : 0] led, // 2位LED输出(外部硬件)
output wire [31: 0] cnt // 32位计数器数据输出(可接外部计数模块)
);
// 内部寄存器:映射AXI-Lite外部端口信号,方便时序控制
reg [C_S_AXI_ADDR_WIDTH-1 : 0] axi_awaddr; // 锁存写地址
reg axi_awready; // 内部写地址准备好
reg axi_wready; // 内部写数据准备好
reg [1 : 0] axi_bresp; // 内部写响应
reg axi_bvalid; // 内部写响应有效
reg [C_S_AXI_ADDR_WIDTH-1 : 0] axi_araddr; // 锁存读地址
reg axi_arready; // 内部读地址准备好
reg [C_S_AXI_DATA_WIDTH-1 : 0] axi_rdata; // 内部读数据
reg [1 : 0] axi_rresp; // 内部读响应
reg axi_rvalid; // 内部读数据有效
// 地址解析参数:32位数据位宽,地址按4字节对齐,计算地址最低有效位
localparam integer ADDR_LSB = (C_S_AXI_DATA_WIDTH/32) + 1;
localparam integer OPT_MEM_ADDR_BITS = 1;
// 核心:4个32位从设备寄存器(AXI-Lite地址映射的核心,共16字节,匹配4位地址)
// 寄存器地址映射:slv_reg0→0x00, slv_reg1→0x04, slv_reg2→0x08, slv_reg3→0x0C
reg [C_S_AXI_DATA_WIDTH-1:0] slv_reg0; // 控制寄存器:低2位→LED输出
reg [C_S_AXI_DATA_WIDTH-1:0] slv_reg1; // 数据寄存器:映射cnt输出,可主设备读写
reg [C_S_AXI_DATA_WIDTH-1:0] slv_reg2; // 备用寄存器:主设备可自由读写
reg [C_S_AXI_DATA_WIDTH-1:0] slv_reg3; // 备用寄存器:主设备可自由读写
wire slv_reg_rden; // 寄存器读使能(地址握手成功后置1)
wire slv_reg_wren; // 寄存器写使能(地址+数据握手成功后置1)
reg [C_S_AXI_DATA_WIDTH-1:0] reg_data_out; // 读数据临时缓存
integer byte_index; // 字节索引(用于按字节写寄存器,匹配WSTRB)
reg aw_en; // 写地址使能(防止重复写地址,握手控制)
// 内部寄存器映射到AXI-Lite外部输出端口
assign S_AXI_AWREADY = axi_awready;
assign S_AXI_WREADY = axi_wready;
assign S_AXI_BRESP = axi_bresp;
assign S_AXI_BVALID = axi_bvalid;
assign S_AXI_ARREADY = axi_arready;
assign S_AXI_RDATA = axi_rdata;
assign S_AXI_RRESP = axi_rresp;
assign S_AXI_RVALID = axi_rvalid;
// 1. AXI-Lite 写地址通道握手控制:生成AWREADY,与主设备AWVALID握手
always @( posedge S_AXI_ACLK )begin
if ( S_AXI_ARESETN == 1'b0 )begin
axi_awready <= 1'b0;
aw_en <= 1'b1; // 复位后允许写地址
end
else begin
// 未握手+主设备地址/数据都有效+允许写地址 → 置1AWREADY,完成握手,禁止重复写
if (~axi_awready && S_AXI_AWVALID && S_AXI_WVALID && aw_en)begin
axi_awready <= 1'b1;
aw_en <= 1'b0;
end
// 写响应握手完成 → 重新允许写地址,拉低AWREADY
else if (S_AXI_BREADY && axi_bvalid)begin
aw_en <= 1'b1;
axi_awready <= 1'b0;
end
else begin
axi_awready <= 1'b0;
end
end
end
// 2. 写地址锁存:握手成功时,将主设备的AWADDR锁存到内部寄存器
always @( posedge S_AXI_ACLK )begin
if ( S_AXI_ARESETN == 1'b0 )begin
axi_awaddr <= 0;
end
else begin
if(~axi_awready && S_AXI_AWVALID && S_AXI_WVALID && aw_en)begin
axi_awaddr <= S_AXI_AWADDR;
end
end
end
// 3. AXI-Lite 写数据通道握手控制:生成WREADY,与主设备WVALID握手
always @( posedge S_AXI_ACLK )begin
if ( S_AXI_ARESETN == 1'b0 )begin
axi_wready <= 1'b0;
end
else begin
// 未握手+主设备地址/数据都有效+允许写地址 → 置1WREADY,完成数据握手
if (~axi_wready && S_AXI_WVALID && S_AXI_AWVALID && aw_en )begin
axi_wready <= 1'b1;
end
else begin
axi_wready <= 1'b0;
end
end
end
// 写使能生成:地址+数据都握手成功 → 置1,触发寄存器写操作
assign slv_reg_wren = axi_wready && S_AXI_WVALID && axi_awready && S_AXI_AWVALID;
// 4. 从设备寄存器写操作:根据写地址+写字节选通,将主设备WDATA写入对应寄存器
// 支持按字节写(WSTRB哪位置1,对应字节就写入),32位时默认全写(WSTRB=4'b1111)
always @( posedge S_AXI_ACLK )begin
if ( S_AXI_ARESETN == 1'b0 )begin // 复位时寄存器清0
slv_reg0 <= 0;
slv_reg1 <= 0;
slv_reg2 <= 0;
slv_reg3 <= 0;
end
else begin
if (slv_reg_wren)begin // 写使能有效时,按地址解码写入对应寄存器
case ( axi_awaddr[ADDR_LSB+OPT_MEM_ADDR_BITS:ADDR_LSB] )
2'h0: // 写slv_reg0(LED控制寄存器)
for ( byte_index = 0; byte_index <= (C_S_AXI_DATA_WIDTH/8)-1; byte_index = byte_index+1 )
if ( S_AXI_WSTRB[byte_index] == 1 ) begin
slv_reg0[(byte_index*8) +: 8] <= S_AXI_WDATA[(byte_index*8) +: 8];
end
2'h1: // 写slv_reg1(计数器数据寄存器)
for ( byte_index = 0; byte_index <= (C_S_AXI_DATA_WIDTH/8)-1; byte_index = byte_index+1 )
if ( S_AXI_WSTRB[byte_index] == 1 ) begin
slv_reg1[(byte_index*8) +: 8] <= S_AXI_WDATA[(byte_index*8) +: 8];
end
2'h2: // 写slv_reg2(备用寄存器)
for ( byte_index = 0; byte_index <= (C_S_AXI_DATA_WIDTH/8)-1; byte_index = byte_index+1 )
if ( S_AXI_WSTRB[byte_index] == 1 ) begin
slv_reg2[(byte_index*8) +: 8] <= S_AXI_WDATA[(byte_index*8) +: 8];
end
2'h3: // 写slv_reg3(备用寄存器)
for ( byte_index = 0; byte_index <= (C_S_AXI_DATA_WIDTH/8)-1; byte_index = byte_index+1 )
if ( S_AXI_WSTRB[byte_index] == 1 ) begin
slv_reg3[(byte_index*8) +: 8] <= S_AXI_WDATA[(byte_index*8) +: 8];
end
default : begin // 无效地址,寄存器保持不变
slv_reg0 <= slv_reg0;
slv_reg1 <= slv_reg1;
slv_reg2 <= slv_reg2;
slv_reg3 <= slv_reg3;
end
endcase
end
end
end
// 5. AXI-Lite 写响应通道控制:生成BVALID+BRESP,向主设备返回写结果
always @( posedge S_AXI_ACLK )begin
if ( S_AXI_ARESETN == 1'b0 )begin
axi_bvalid <= 0;
axi_bresp <= 2'b0; // 00=AXI标准OKAY,写成功
end
else begin
// 地址+数据都握手成功 → 置1BVALID,返回成功响应
if (axi_awready && S_AXI_AWVALID && ~axi_bvalid && axi_wready && S_AXI_WVALID)begin
axi_bvalid <= 1'b1;
axi_bresp <= 2'b0;
end
else begin
// 主设备接收响应(BREADY=1)→ 拉低BVALID
if (S_AXI_BREADY && axi_bvalid) begin
axi_bvalid <= 1'b0;
end
end
end
end
// 6. AXI-Lite 读地址通道握手控制:生成ARREADY,与主设备ARVALID握手
always @( posedge S_AXI_ACLK )begin
if ( S_AXI_ARESETN == 1'b0 )begin
axi_arready <= 1'b0;
axi_araddr <= 32'b0;
end
else begin
// 未握手+主设备读地址有效 → 置1ARREADY,完成握手,锁存读地址
if (~axi_arready && S_AXI_ARVALID)begin
axi_arready <= 1'b1;
axi_araddr <= S_AXI_ARADDR;
end
else begin
axi_arready <= 1'b0;
end
end
end
// 7. AXI-Lite 读数据/响应通道控制:生成RVALID+RRESP,准备读数据
always @( posedge S_AXI_ACLK )begin
if ( S_AXI_ARESETN == 1'b0 )begin
axi_rvalid <= 0;
axi_rresp <= 0;
end
else begin
// 读地址握手成功+读数据未有效 → 置1RVALID,返回成功响应
if (axi_arready && S_AXI_ARVALID && ~axi_rvalid)begin
axi_rvalid <= 1'b1;
axi_rresp <= 2'b0; // 00=AXI标准OKAY,读成功
end
// 主设备接收读数据(RREADY=1)→ 拉低RVALID
else if (axi_rvalid && S_AXI_RREADY)begin
axi_rvalid <= 0;
end
end
end
// 读使能生成:读地址握手成功 → 置1,触发寄存器读操作
assign slv_reg_rden = axi_arready & S_AXI_ARVALID & ~axi_rvalid;
// 8. 从设备寄存器读操作:根据读地址解码,选择要返回给主设备的数据
// 地址映射:0x00→btn(按键输入,只读)、0x04→slv_reg1、0x08→slv_reg2、0x0C→slv_reg3
always @(*)
begin
case ( axi_araddr[ADDR_LSB+OPT_MEM_ADDR_BITS:ADDR_LSB] )
2'h0 : reg_data_out <= {30'd0,btn}; // 0x00地址:返回2位按键值,高30位补0
2'h1 : reg_data_out <= slv_reg1; // 0x04地址:返回计数器寄存器数据
2'h2 : reg_data_out <= slv_reg2; // 0x08地址:返回备用寄存器2
2'h3 : reg_data_out <= slv_reg3; // 0x0C地址:返回备用寄存器3
default : reg_data_out <= 0; // 无效地址,返回0
endcase
end
// 9. 读数据锁存:将解析后的寄存器数据锁存到RDATA,返回给主设备
always @( posedge S_AXI_ACLK )begin
if ( S_AXI_ARESETN == 1'b0 )begin
axi_rdata <= 0;
end
else begin
if (slv_reg_rden)begin
axi_rdata <= reg_data_out; // 读使能有效,将数据写入RDATA
end
end
end
// GPIO外设接口映射:从设备寄存器→实际硬件信号
assign led = slv_reg0[1:0]; // slv_reg0低2位直接映射为LED输出
assign cnt = slv_reg1; // slv_reg1直接映射为32位计数器输出
endmodule五、模拟仿真
加快仿真,可以把 maxi_lite_gpio 的 IP 源码中读写的间隔时间减少,如下图所示: 
 每次更改 ip 源码后,在 Tcl Console 中输入 reset_project 对 fpga 工程进行复位 单击 Refresh IP Catalog 更新 IP 状态 再单击 Upgrade Selected
每次更改 ip 源码后,在 Tcl Console 中输入 reset_project 对 fpga 工程进行复位 单击 Refresh IP Catalog 更新 IP 状态 再单击 Upgrade Selected
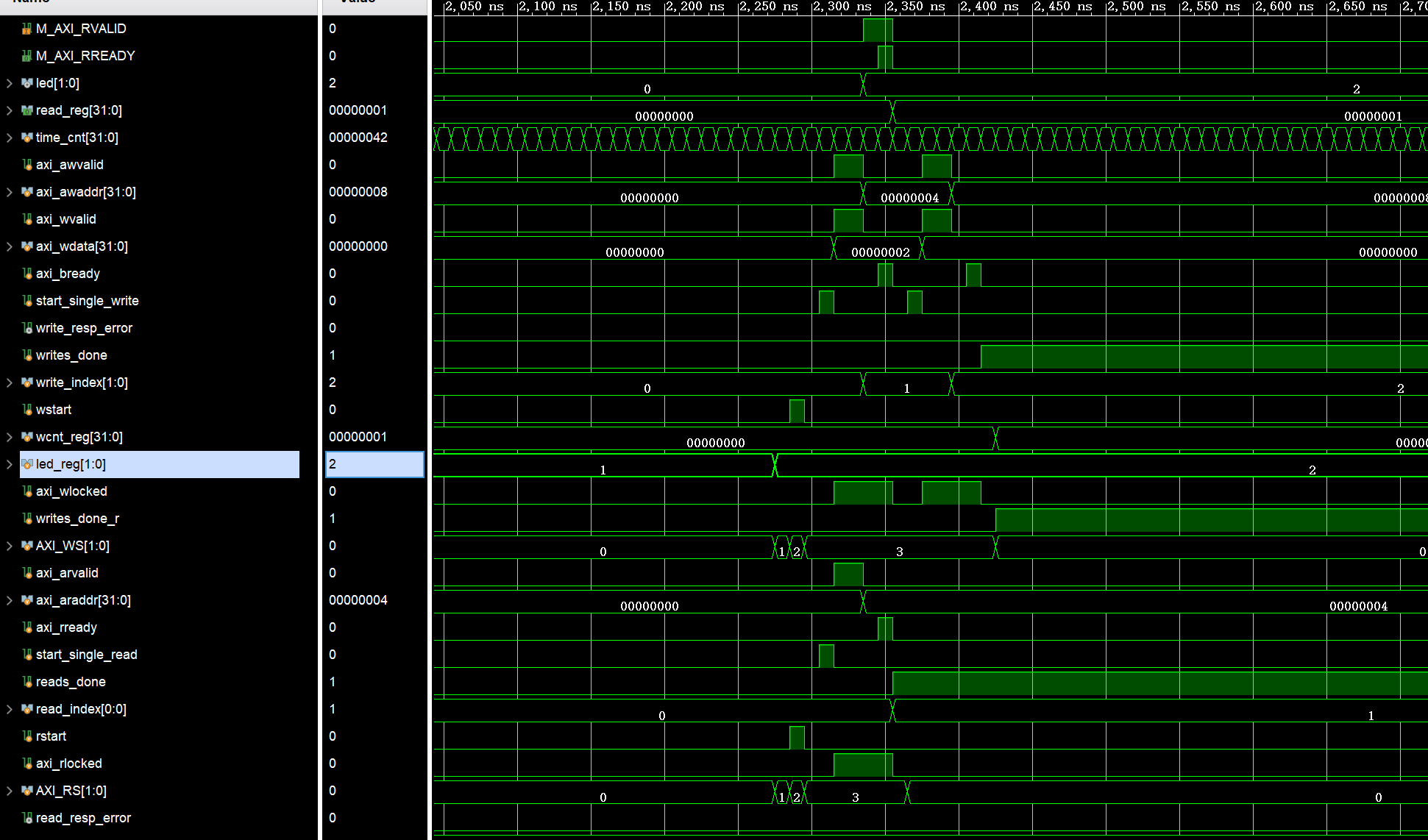
仿真
主机仿真信号 
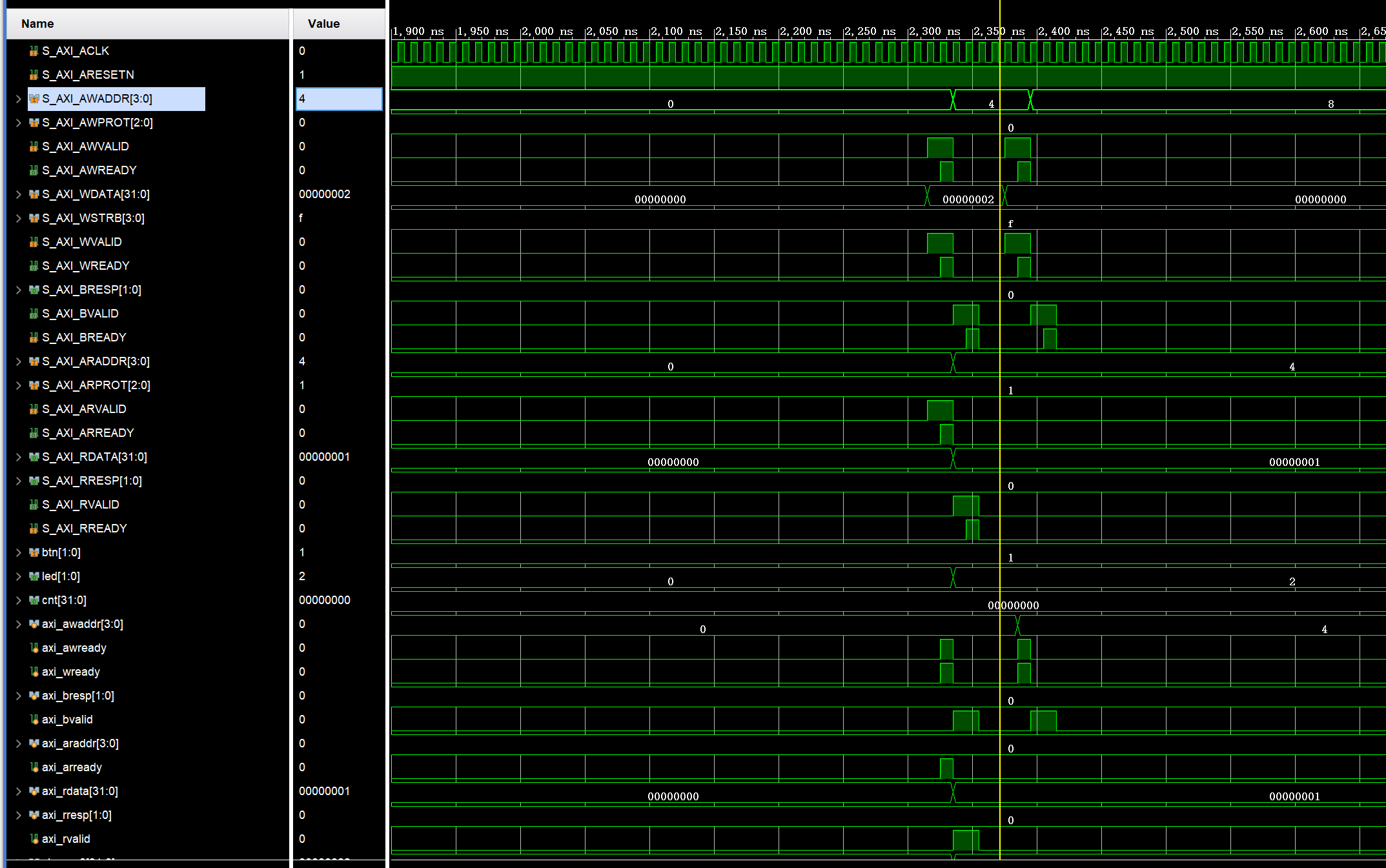
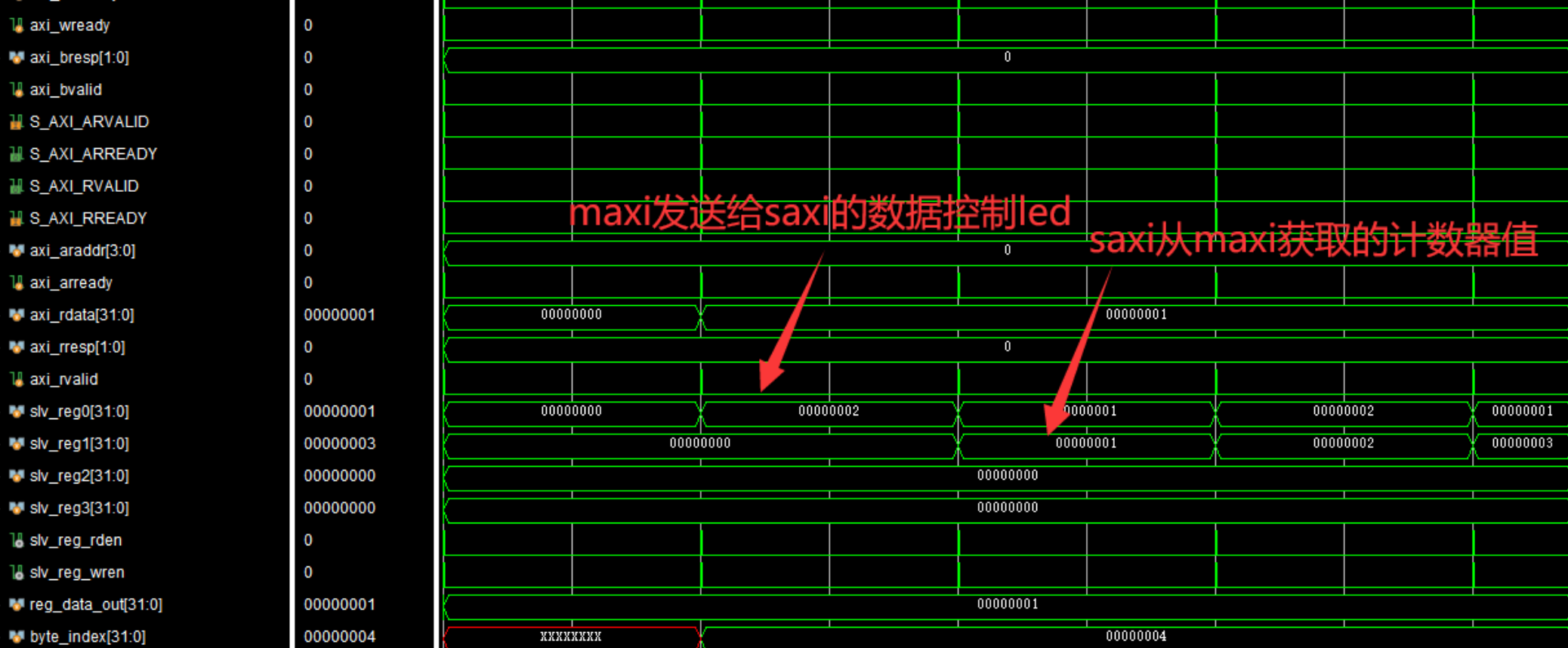
从机仿真信号 

六、遇到的问题
1 自己打包的IP核有问题


贡献者
 dz13718198068
dz13718198068