主要分为三个部分, 第一部分是中断函数是怎么使用的:通过MIO按键利用中断控制LED亮灭 第二部分是在UART控制器中如何使用串口中断 第三部分是在定时器中使用中断
一、中断函数是怎么使用的
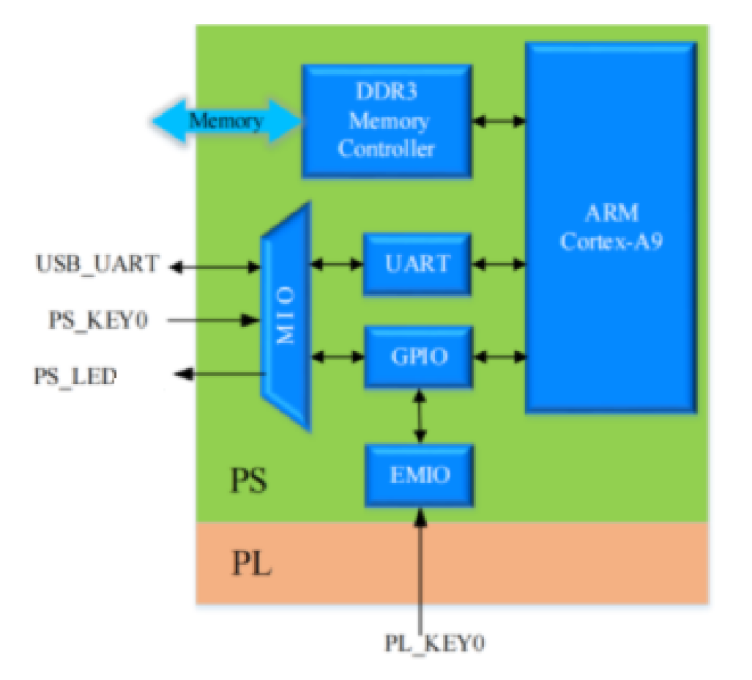
GPIO模块框图: 
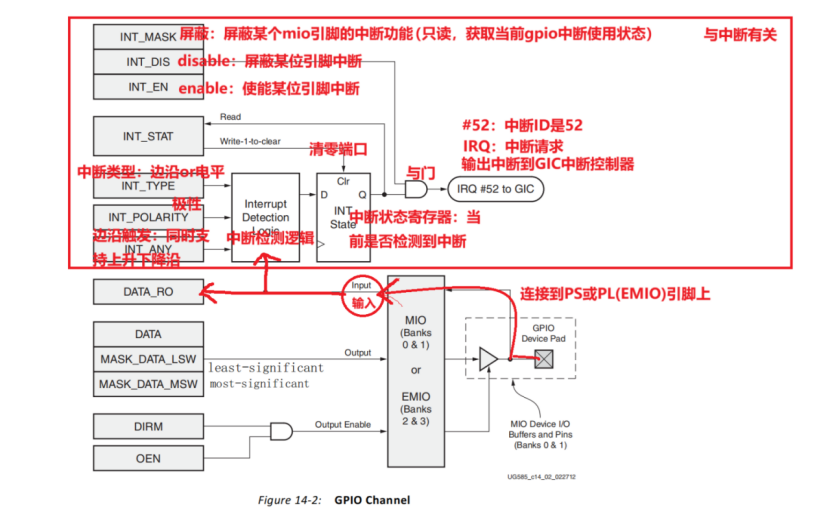
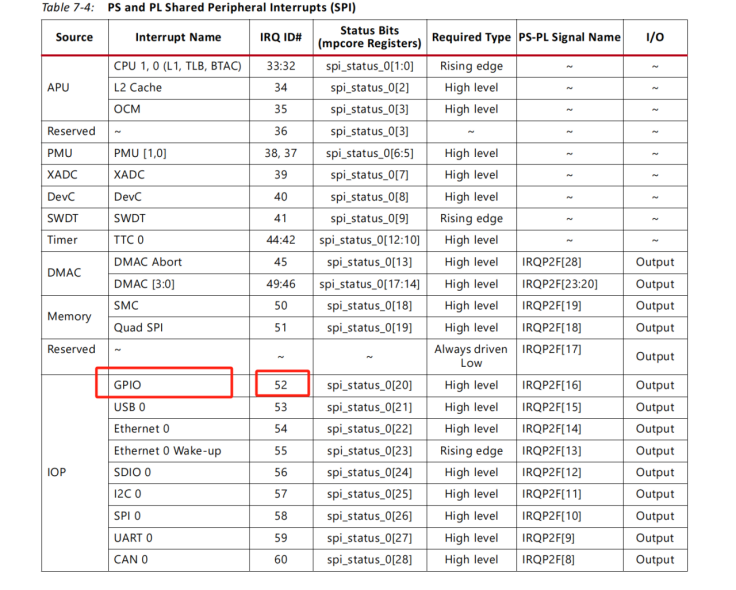
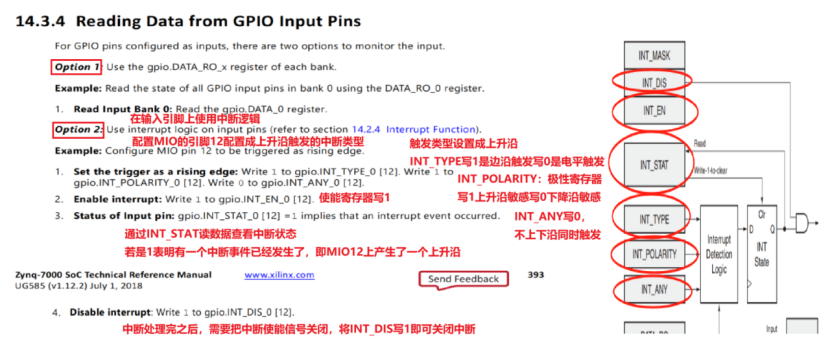
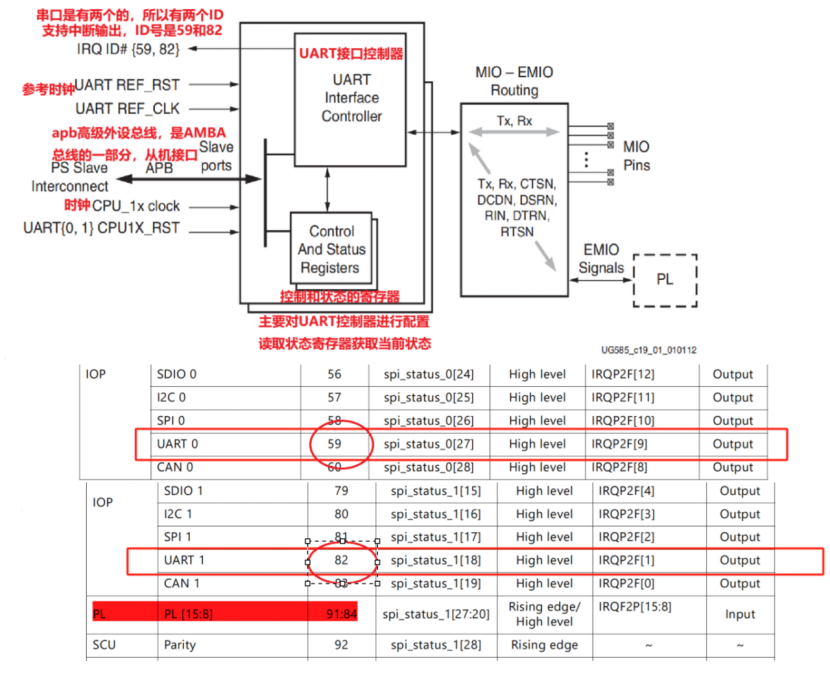
GIC如何知道中断请求来自哪里:中断ID,例如GPIO的ID是#52,根据ID识别中断是来自哪个外设的 ug585第229页列出了中断ID 

Q&A:
Q1:若GPIO产生了中断,GIC如何知道中断时来自于哪个引脚的 A1:最终传递给GIC的中断信号,可以通过INT_MASK的值来判断,中断来自于被屏蔽掉的信号之外的按键
Q2:若几个引脚都使能了,没有被屏蔽,如何判断中断来自于那个引脚 A2:INT_STAT寄存器,寄存了每个引脚中断的状态,可以通过查看该寄存器状态判断中断来源。中断会通过或or逻辑传递给GIC。
Q3:中断逻辑的或门如何运作 A3:中断会通过或or逻辑传输给GIC,GPIO一共有118个(54+64)引脚,不论是那个引脚产生了中断,都会向GIC产生一个中断请求。需要通过MASK和INT_STAT这两个寄存器去判断是哪一个寄存器产生的中断信号。
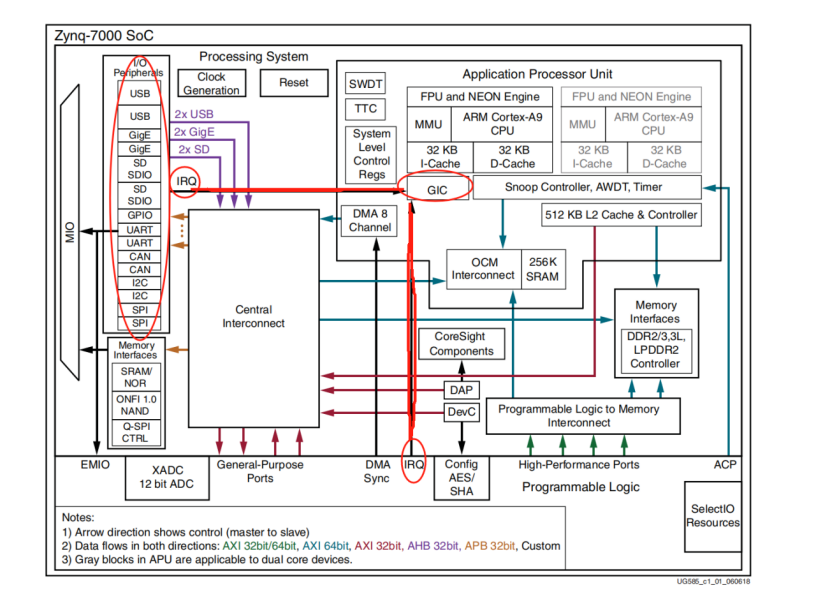
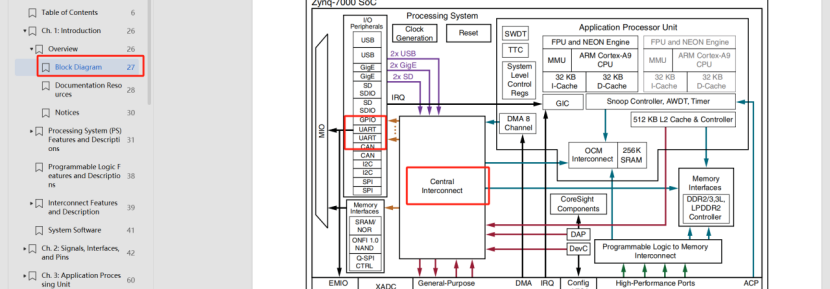
系统框图 
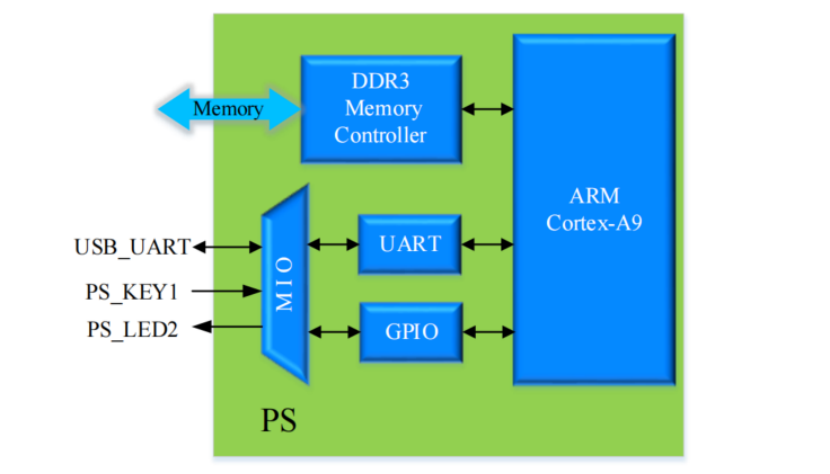
正点原子实验的系统框图是通过PS端的按键通过中断控制LED,但实验室开发板资源PS端没有按键,因此可通过EMIO将PL端的按键替换正点原子实验里的PS端按键 
ug585编程指导:
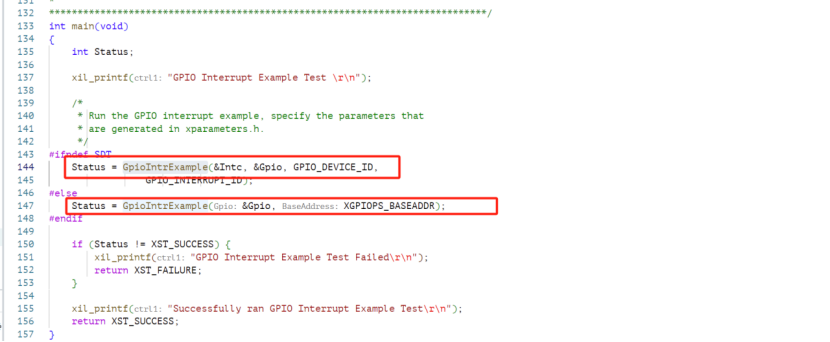
drivers里的例程:
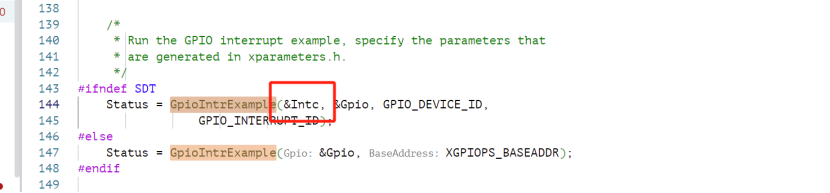
main函数里的GpioIntrExample函数是此次实验的核心函数 
GpioIntrExample函数
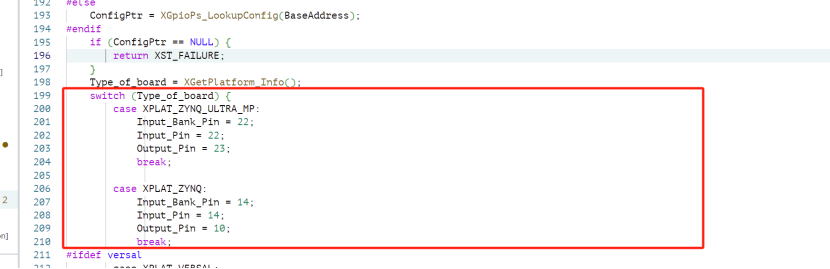
通过case进行芯片选型开发板类型 
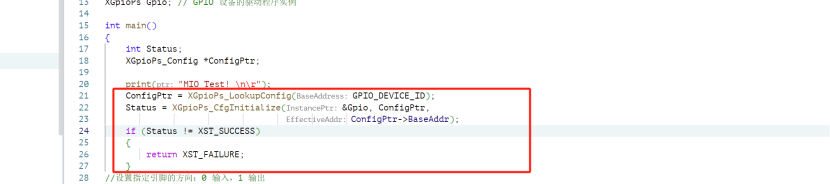
查找PS的GPIO查找器件驱动 

对GPIO器件进行初始化 

查找期间驱动和对PSGPIO进行初始化的程序在之前用过,如下 使用所有的器件之前,都需要这样的过程,查找配置信息及初始化 
GPIO器件的自测程序 

给特定的引脚设置方向,例如把GPIO的按键设置成输入 设置输出端口并使能 

设置中断系统。所以中断的信息应该在这个函数当中,详细观察该函数 



XScuGic类型,是ps里的通用的中断控制器 XGpioPs类型是Gpio的实例 GpioIntrId:中断的ID,对于gpio来说就是52
类型的注释如下 

函数内容: 
GPIO_INTERRUPT_ID通过ctrl按键查找发现其实就是52,与ug585中的中断号对应 

报错Intc没有声明,Intc是什么?Intc是从example里传递过来的 


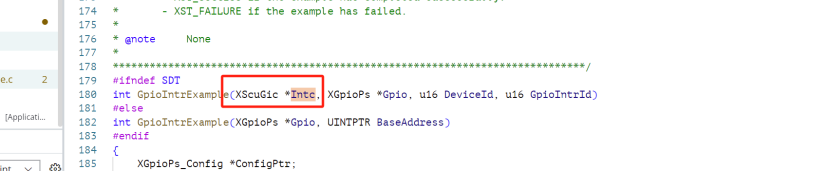
Intc是XScuGic的类型,数据从哪里来? 
找到Intc变量,这是中断控制器的驱动实例 
复制过来,但该类型并未声明 
需找到该类型头文件 

在声明中1,2变量均为指针类型变量,需要用的是这两个驱动实例的指针,因此需要在函数里也用指针 

加个取地址的符号 

下面仔细研究SetupInterruptSystem这个函数内部 用于反应函数运行的结果,用于寄存运行的结果,这个status不需要,可以删掉 
声明了一个配置类型的指针 这是中断控制器的实例,里面包含了中断的配置信息 

类似于int main里的XGpioPs_Config *ConfigPtr; 

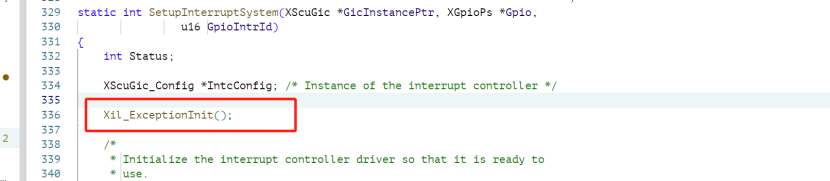
Xil_ExceptionInit();是什么, 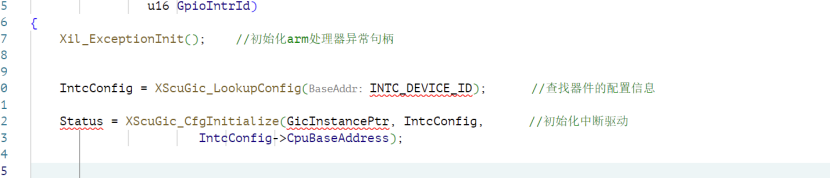
中断控制器ID没有定义,参照示例程序定义ID,因为只有一个GIC器件,因此ID号其实是0 ![]()
![]()
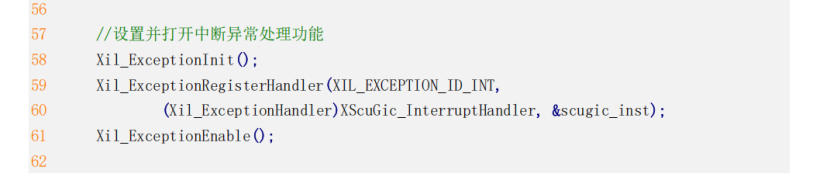
这三个函数,只要用到外设的中断功能,就需要这几个函数
初始化并设置 ARM 处理器的异常处理功能。ARM 处理器支持 7 种异常情况:复位、未定义指令、软件中断、指令预取中止、数据中止、中断请求(IRQ)和快速中断请求(FIQ)。每种异常也都有自己的 ID 标识,其中 XIL_EXCEPTION_ID_INT 用于标识中断请求(IRQ)异常。我们通过调用函数 Xil_ExceptionRegisterHandler( XIL_EXCEPTION_ID_INT, (Xil_ExceptionHandler) XScuGic_InterruptHandler, &scugic_inst )来给 IRQ 异常注册处理程序,它会将中断控制器 GIC 的中断处理程序与 ARM 处理器中的硬件中断处理逻辑连接起来。另外还要通过 Xil_ExceptionEnable( )函数使能 IRQ 异常。 
关联中断处理函数,变量有:中断控制器驱动实例指针,GPIO中断ID号52,中断的处理函数句柄,回调参考通常是驱动的指针 
下面是中断的设置的步骤 首先是设置中断类型 

详细看该函数 这个函数是给整个bank的pin设置中断类型 如果给单独的GPIO的引脚设置中断类型可使用XGpioPs_SetPinIntrType(). 本次实验只想给单独引脚设置中断,所以可用XGpioPs_SetPinIntrType().这个函数,去头文件找一下 XGpioPs_SetIntrTypePin可以给单独引脚设置中断类型 ![]()
![]()
中断类型可以看.h里的宏定义看看 
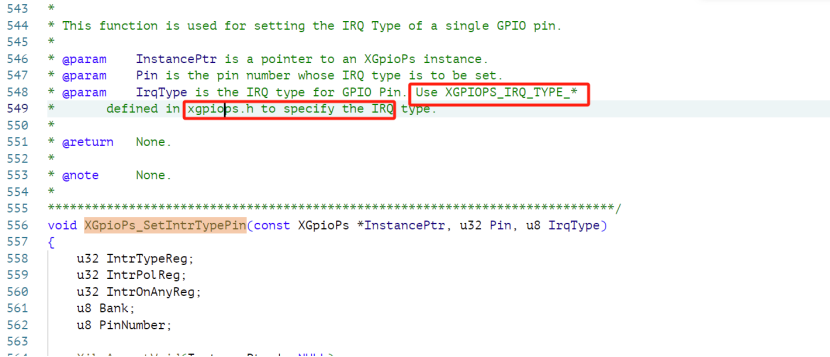
这个就是宏定义,上升沿、下降沿、双沿、高电平、低电平 

因为按键按下是下降沿,因此选择XGPIOPS_IRQ_TYPE_EDGE_FALLING,吧MIO12这个引脚中断类型设置好 ![]()
![]()
下面这个函数是设置回调函数的句柄,其实就是给GPIO中断设置一个中断的服务函数,就是每一个中断来的时候需要给一个中断服务函数,中断来的时候要首先执行一下这个中断服务函数,之后后再回到主函数中去执行。 

这个函数的功能与XScuGic_Connect类似,只不过是给GIC控制器的异常处理函数的XGpioPs_IntrHandler 其中的XGpioPs_IntrHandler就是XGpioPs_SetCallbackHandler来设置的 也就是说将XScuGic_InterruptHandler这个句柄最终指向IntrHandler这个句柄 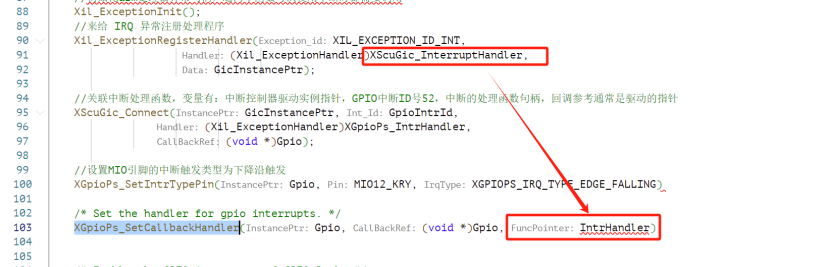
最终的IntrHandler句柄是我们自己编写的中断函数
这两个函数可以合并成一个函数,可以把自己编写的中断函数IntrHandler直接放到Xil_ExceptionRegisterHandler中的XScuGic_InterruptHandler 
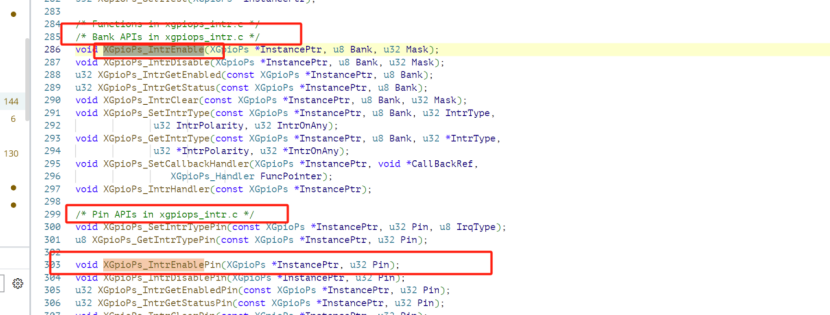
例程中的如下信号是给整个bank的中断使能信号 

进入详细看看,去头文件看看,下面有对单独引脚设置使能信号的函数即XGpioPs_I ntrEnablePin(XGpioPs *InstancePtr, u32 Pin); 
代码如下 
GIC可以接收很多信号的中断,包括PS里的外设或PL的一些中断,可以接收,也可以屏蔽 打开GPIO外设中断的使能信号 其中有个中断的ID,每个中断源发送请求都会标出中断号,52 
这两个函数有什么区别呢 上面是对GPIO外设进行配置,使能其中的一个MIO引脚的中断功能 下面的函数是对中断控制器进行一个配置,是为了打开GPIO外设中断的功能 
最后还有一个函数 
Xil_ExceptionEnableMask其实是与Xil_ExceptionInit();和Xil_ExceptionRegisterHandler属于同一组函数 其作用是使能处理器的中断
接下来最重要的是编写中断服务函数 先看示例里是怎么写的 
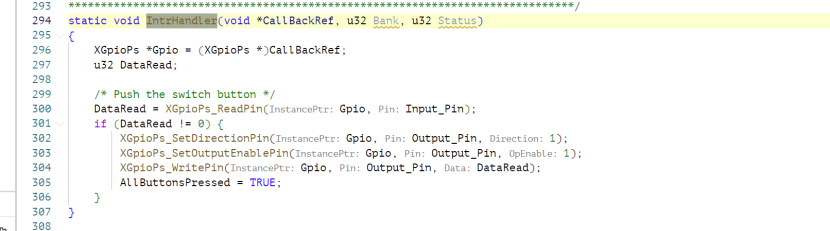
中断服务函数需要自己写,但是可以先写个简单的,测试一下是否成功调动中断服务函数 



检测到中断服务函数可以正常运行,接下来怎么写中断服务函数?? 可以编写一个通过按键中断使led灯取反的操作 
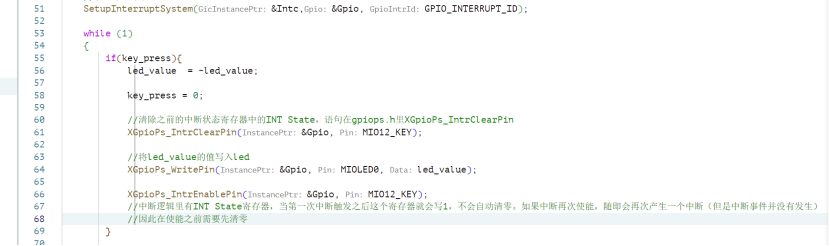

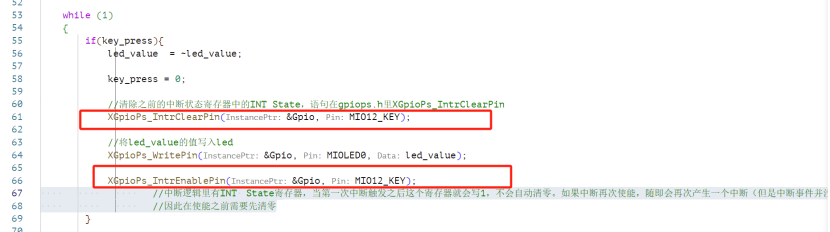
每次按下按键进入中断函数,使key_press置1,然后检测到key_press置1的时候对led取反
但是中断逻辑里有INT State寄存器,当第一次中断触发之后这个寄存器就会写1,不会自动清零。如果中断再次使能,随即会再次产生一个中断(但是中断事件并没有发生)因此在使能之前需要先清零。 
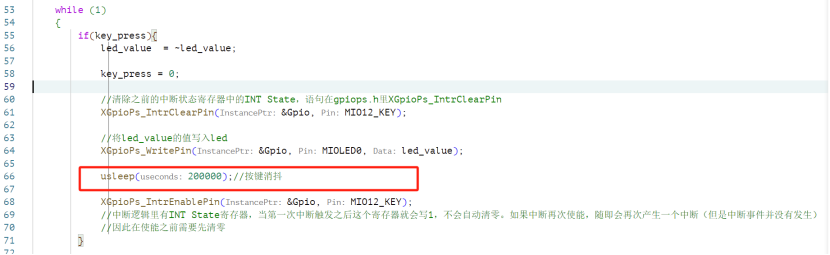
按键的抖动会导致按一次检测到多个下降沿,加入按键消抖功能,可以直接用usleep消抖 
验证成功,我们成功的通过中断来控制led的亮灭。这就是中断函数的应用,那么在工程中中断函数是怎么应用的??? 在工程中我们应该怎么使用中断函数?? 完整代码见最后
二、UART控制器中如何使用串口中断
首先什么是UART控制器呢? 
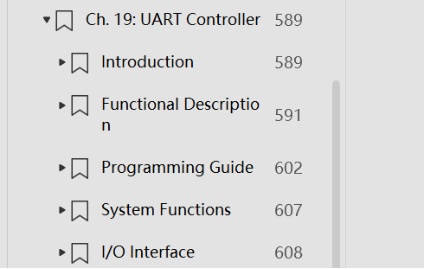
PS中提供了uart,在pl中需要手动写uart时序代码编写uart的时序,但是在ps端并不需要了解时序就可以直接使用uart 可以像操作fifo一样往寄存器里写入数据,uart控制器就能帮我们把控制器发送出去(接收过程同样) 在ug585 的19章有对uart控制器的讲解 
全双工、异步 通过控制 配置和模式寄存器来实现波特率或者发送数据等等配置 有独立的接收和发送的路径(两个) 每个路径包含了一个64字节的fifo,所以操作uart数据有点类似操作FIFO,主要是将数据连续或者非连续的写道FIFO当中 
模式的切换是什么:给RxD和TxD进行配置,有四种模式,后面详细介绍 FIFO的中断状态为支持轮询 或者 中断 的方式 轮巡:不同的读取FIFO寄存器,检测当前 中断:例如可以配置接收的阈值,当达到这个阈值以后,产生一个中断。其实通过中断的方式可以更好的执行代码,节省cpu资源 收到串口数据打断进程 软件读写数据是通过Rx和T下数据端口寄存器实现的 
串口控制器有两个 可编程不同波特率产生 FIFO深度是64字节 数据位宽6、7、8位 停止位1、1.5、2位 校验方式奇、偶、校验位固定为0、固定为1、没有校验
中断产生 RxD和TxD模式设置:一共有四种
UART控制器框图 
以下为UART的整体框图 
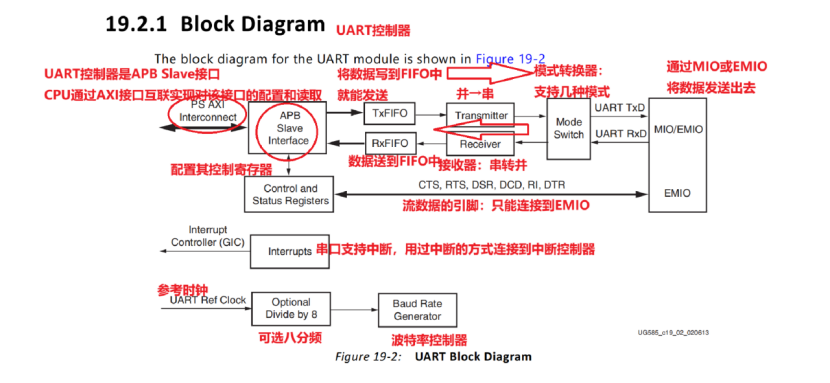
串口要发送数据还是接收数据实际是操纵其FIFO,相对于verilog相对简单,了解寄存器,就可以实现串口收发的功能
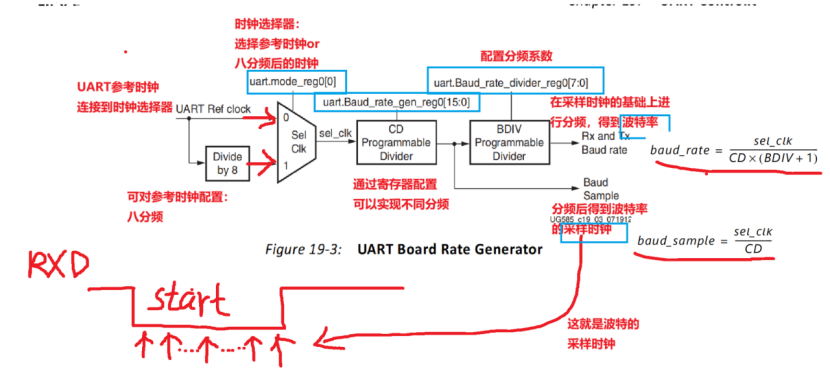
波特率的产生 
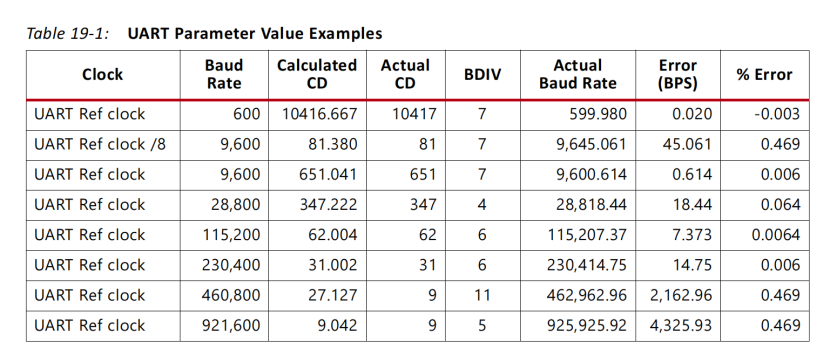
不同的参考时钟表格,对应的实际的波特率 
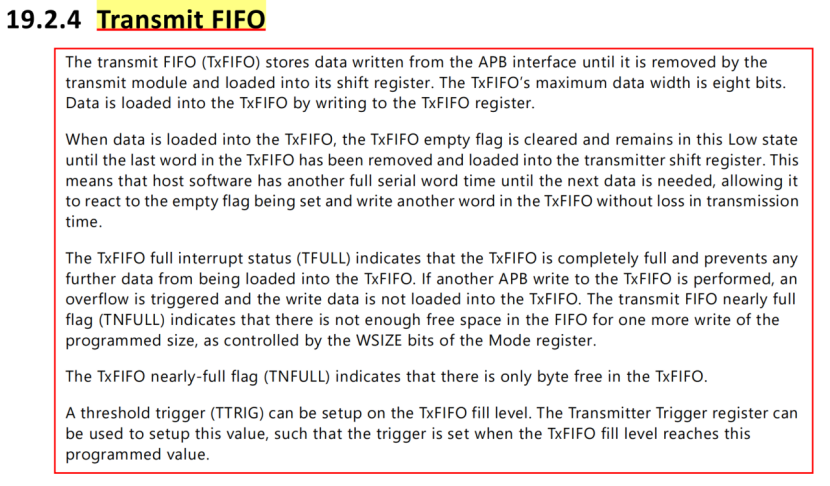
发送FIFO介绍:TxFIFO
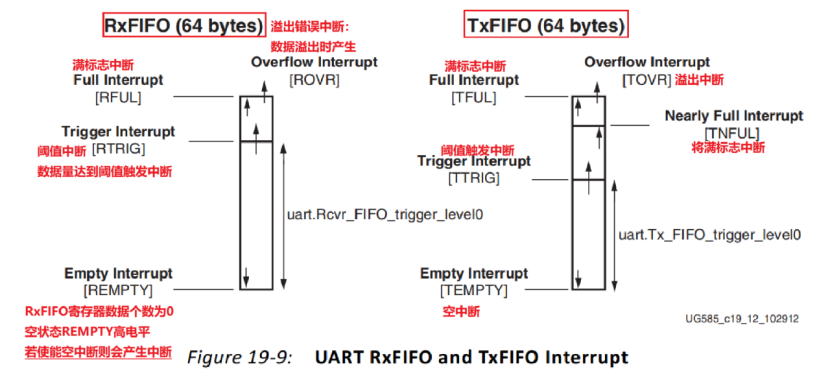
发送FIFO存储了数据,数据由APB接口来进行写入,CPU操控TxFIFO寄存器写入数据存到FIFO中直到读出,并送到移位寄存器(并转串),最大8位 当数据写道发送FIFO内,FIFO的空标志会被清除 空标志:FIFO里写入数据后拉低,当数据读出去后,并加载到为位移寄存器后,空标志拉高 发送器:检测到FIFO非空,就从FIFO中读数据,并将其串行输出出去。并转串时间较长,主机有足够的时间继续像FIFO中写入数据。这样可以衔接每一波特连续传输 TxFIFO满状态标志:FIFO写满,阻止后面数据写入FIFO。FIFO容量只有64字节, TxFIFO将满标志:快满了,可避免写入过多数据导致溢出 发送FIFO阈值触发:当前FIFO还有多少个数据。若配置成10,则当FIFO中达到10个数据以后可以产生标志位或中断,获取状态,知道当前FIFO中数据数量的阈值 
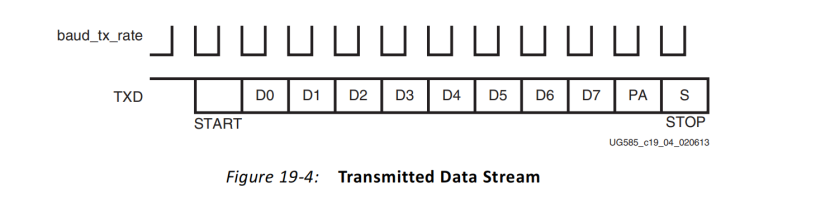
在波特率的控制下将数据按位进行输出 
接收FIFO介绍
接收FIFO数据来源于后面的移位寄存器(串转并),写道RxFIFO中,最大位宽8位 RxFIFO空标志:写入数据后空标志会被清除。CPU通过APB接口读取数据。如果RxFIFO本身就是空的,那读到的数据都是0 RxFIFO满状态:FIFO已经写满,继续接收数据会溢出 阈值触发设置:通过接收触发寄存器进行设置:1-63。FIFO中数据达到阈值量则产生标志位,可通过该标志位产生中断,CPU处理该中断,将数据从接收FIFO中读出来
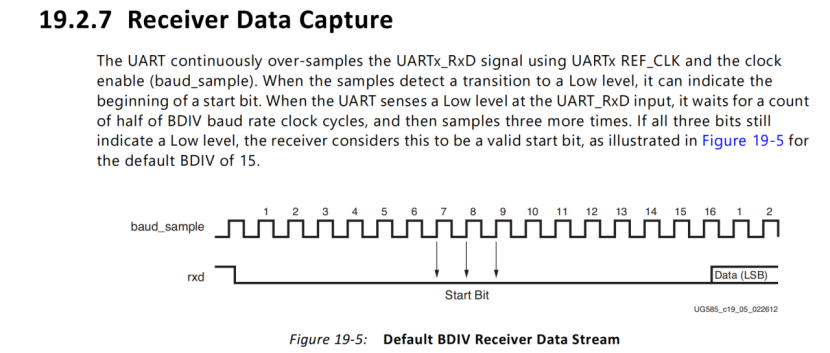
数据采样
由分频寄存器实现 如下图,配置成15,就是对每一位采样16次,采集中心位置为有效数据(较稳定) 
I/O模式的切换
正常模式、自动回应模式、本地环回模式、远端换环回模式 Mode Switch模式切换功能模块:位于发送模块和TxD端口之间,接收器和RxD之间。 箭头所指就是不同模式下的功能
一般用正常模式 正常模式:正常收发数据 自动回应模式:对端设备的数据会环回,CPU可接收数据,但是CPU无法发送数据 本地环回模式:发送器直接连接到接收器 远端环回模式:将接收端直接连接到发送端,CPU无法接收数据或发送数据 
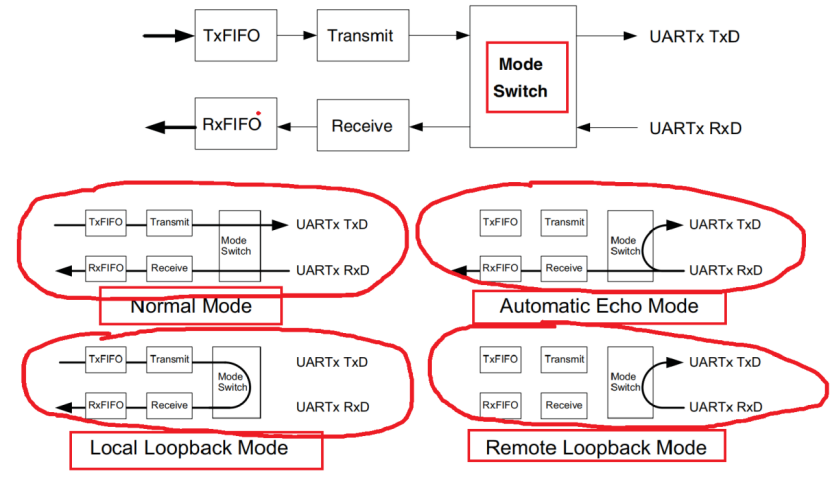
Q1:模式配置是干嘛用的(本地环回模式)? A1:假设我们当前没有外设,或者板子还没有进行串口连接,此时我们想验证一下数据传输是否正确,就可以用本地环回模式,验证一下程序所控制的发送的数据和接受的数据是否一致。
Q2:远端环回模式是干嘛用的: A2:假设我们的程序还没有调通,配置成远端环回模式,通过对端设备下发数据,看一下能不能收到数据,验证一下外部的硬件连接是不是正确的。
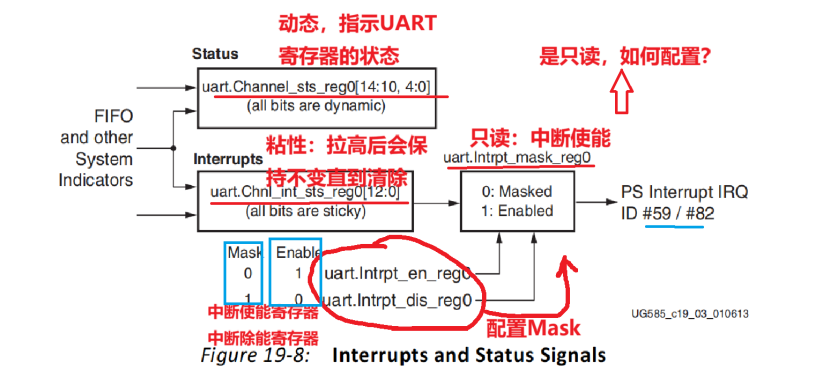
中断和状态寄存器(重要)
有两个状态寄存器,可通过软件读取 中断状态寄存器:读取状态,并产生中断 状态寄存器:只能获取状态
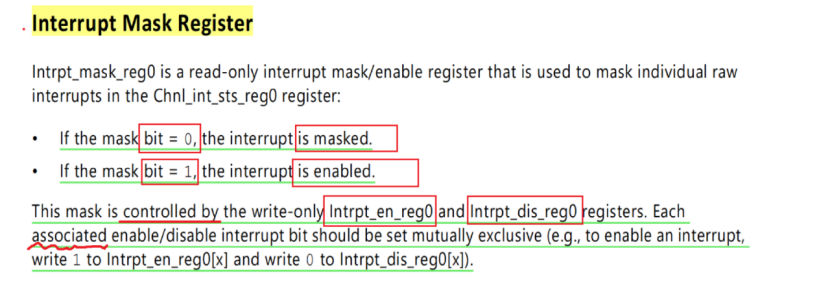
The Chnl_int_sts_reg0 register中断状态寄存器是粘性的(被置位后一直保持,直到软件把它清除。写1清除),这个寄存器与the Intrpt_mask_reg0 mask register中断掩码寄存器是按位与的操作。
什么意思:只有掩码寄存器的某一位是1,中断状态寄存器也是1的时候,与的结果是1,只有都是1时才能产生中断,送到中断控制器。
mask=0,表示屏蔽某位中断 mask=1,表示使能某位中断

中断寄存器框图
如下
中断使能寄存器和中断除能寄存器如果相同,相当于没有开启中断 
寄存器每一位所表示的含义如下 文档中详细写了每个标志位的含义 
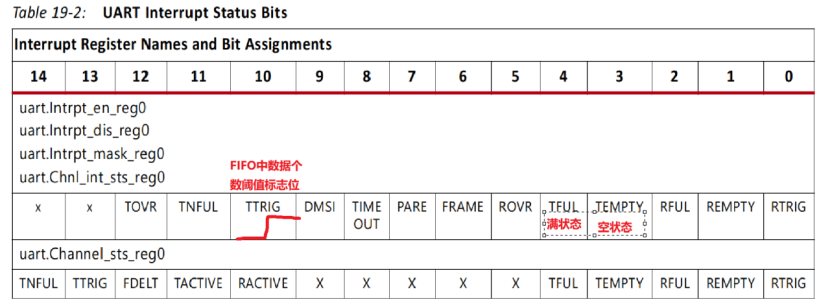

FIFO中断
接收FIFO和发送FIFO框图 UART FIFO产生中断很灵活,可以配置,产生中断框图如下 
编程指南
如何对UART进行配置,以及收发数据如何实现
如何配置寄存器功能
帧格式 波特率 FIFO触发的阈值 
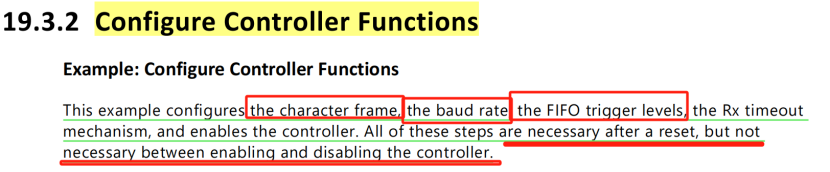
当控制器使能之后做了这些配置,不需要使用这些寄存器时可以除能。下次再需要使用时直接使能就可以,不需要再重新配置了
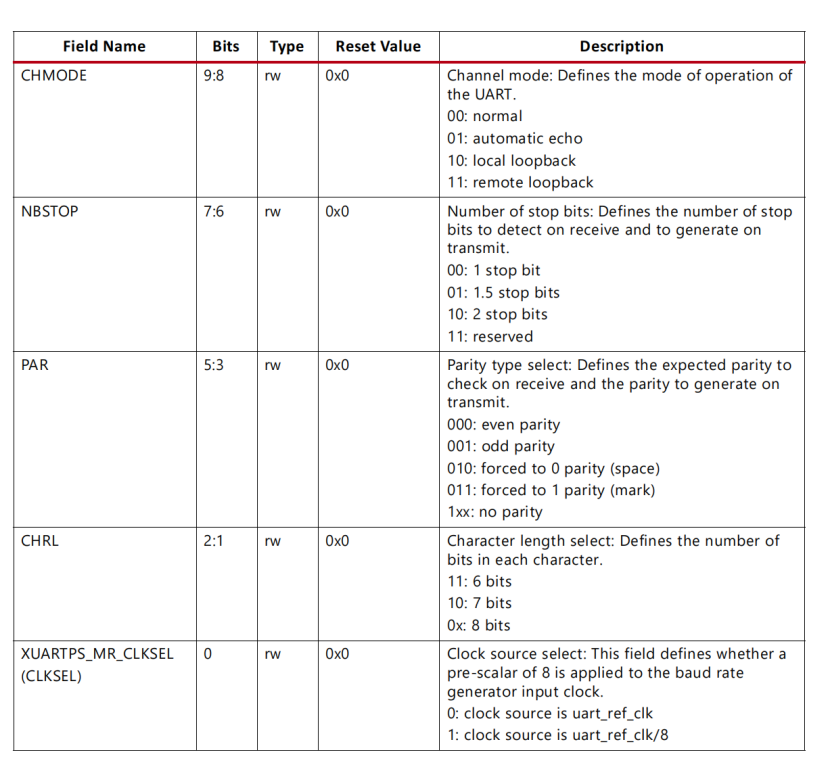
配置uart帧格式
下面给了一个配置uart帧格式个例子 比如向uart.mod_reg0写入0x0000_0020的时候会进行如下配置 
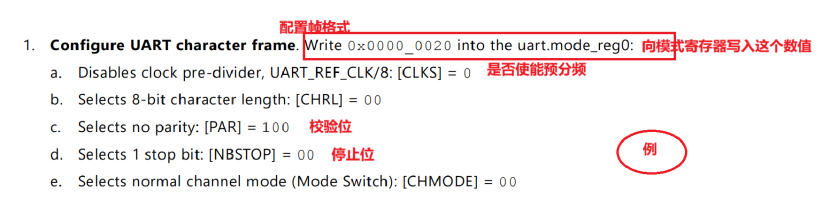
那么每一位对应的配置是如何配置的,ug585中也给了详细怎么配置,可以看文档最后有寄存器详细列表 文档最后有详细配置 例如最低位:使用参考时钟 or 八分频后的时钟 
配置uart的波特率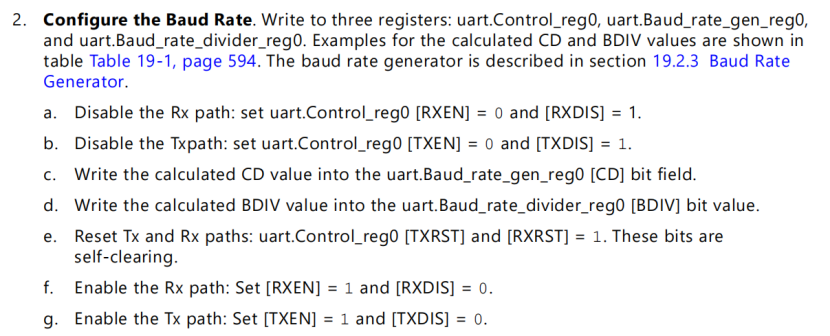
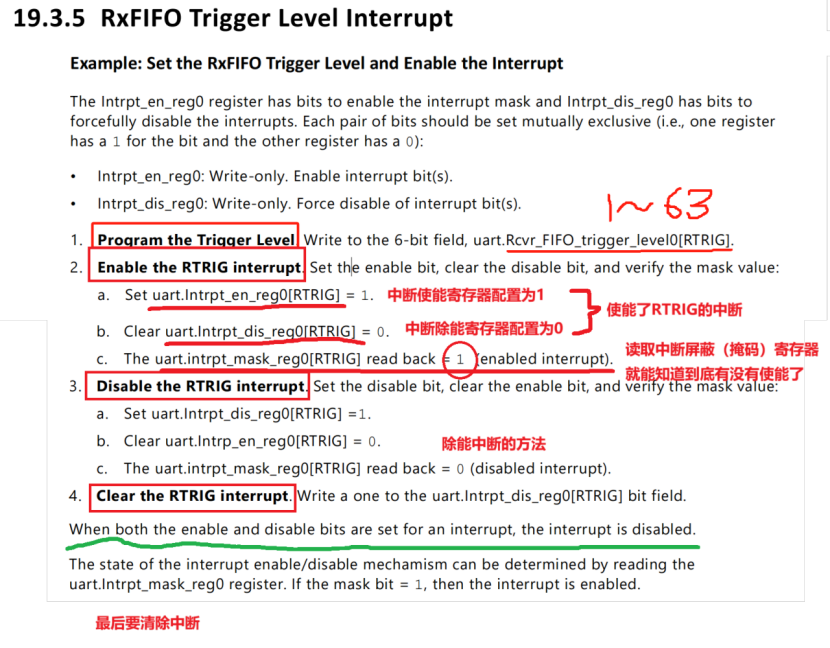
设置RxFIFO触发等级
设置触发等级:写到这个寄存器里面uart.Rcvr_FIFO_trigger_level0配置触发等级,可以写入1-63触发阈值,写0就是disable 

![]()
![]()
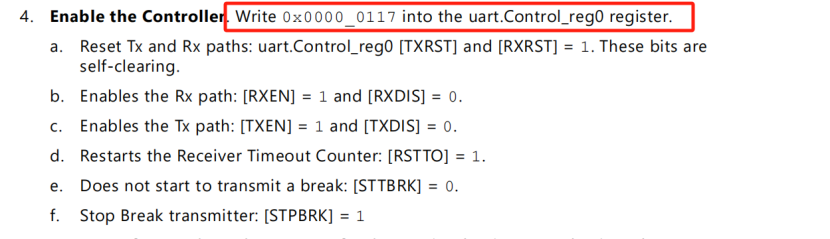
使能控制器
uart.Control_reg0 register.往这个寄存器里面配置使能控制器。0x0000_0117 
以上的配置可以通过库函数来调用这些功能
传输数据
接收数据的两种方式:轮询 or 中断
空时可一次性写入64个字节 
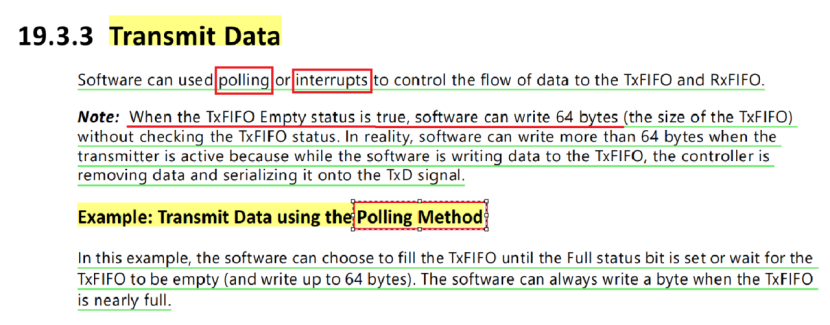
使用轮询方式发送数据
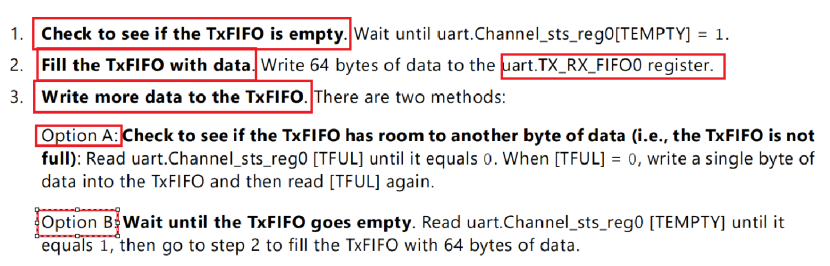
检查FIFO是否空,写入64位数据, 写入更多的数据到fifo,有两种方法 1:检查是否还有位置发送数据 2:等待FIFO空,空后再次写入64字节
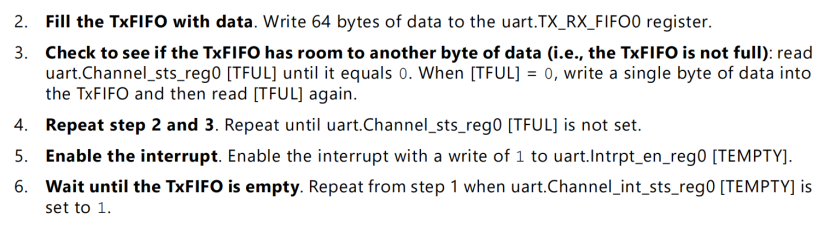
使用中断方式发送数据
对空empty的中断除能 

一次性写入64字节 检查fifo还有没有空间发送数据 重复以上两个步骤 使能中断 等待发送fifo为空,空后返回第一步骤重新除能重新发送数据 
接收数据
轮询方式 or 中断方式
轮询:
等待数据量达到阈值 从RxFIFO中读出数据 重复第二步骤直到读空 接收超时,清零status bit
中断:
使能中断 等待RxFIFO数据量达到阈值 or 接收超时 读出数据:TX_RX_FIFO0 重复2、3过程 清除中断 
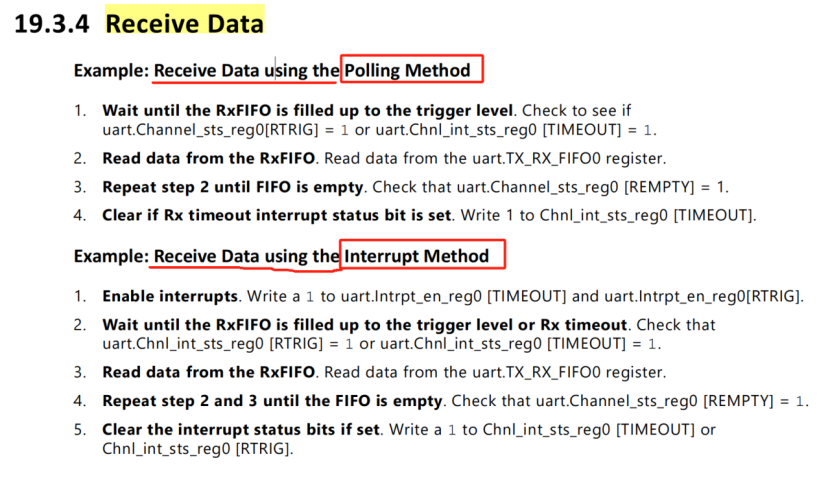
TX_RX_FIFO0: 将数据发送出去操纵的时TX_RX_FIFO0,然而将数据读进来也是操作的这个寄存器TX_RX_FIFO0 虽然操作的是同一个寄存器,但是其实是两个不同的FIFO 文档中有该寄存器的介绍(文档最后) 



低八位,可读可写
接收FIFO触发阈值的中断
UART中断的实现
任务:通过UART控制器,完成串口中断数据的环回的功能
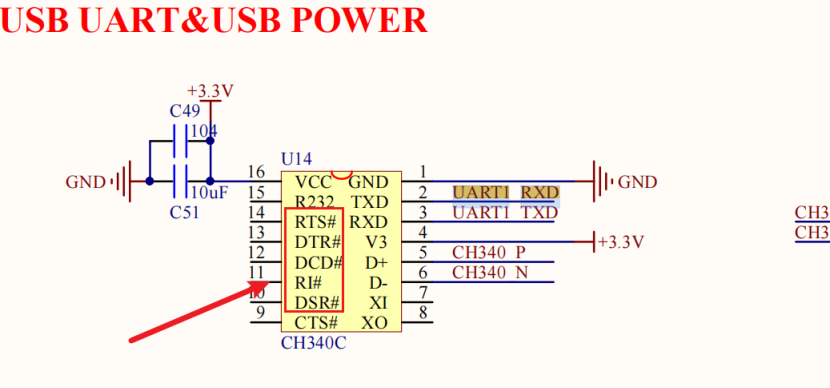
硬件连接,连接到MIO14和MIO15 


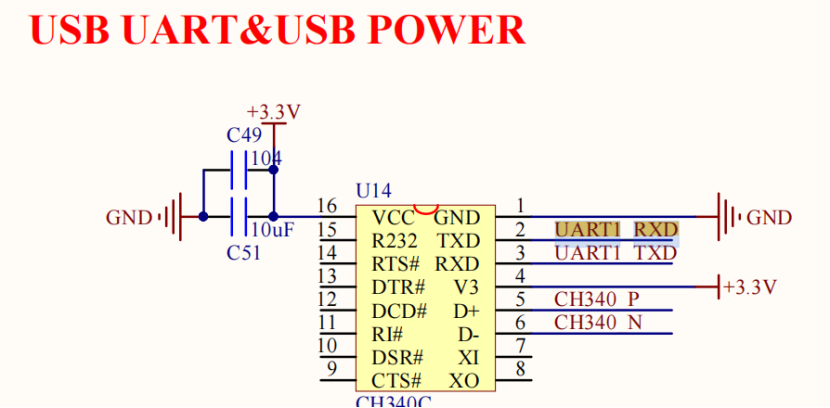
系统框图 
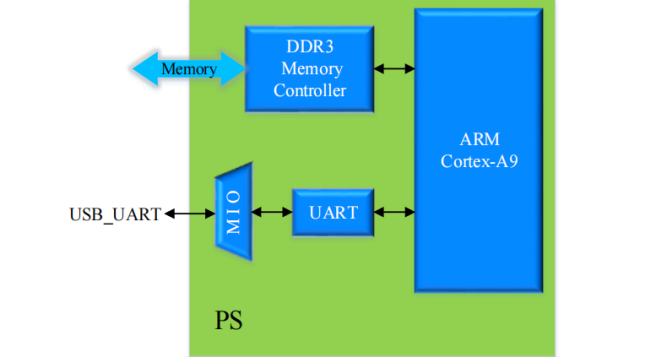
系统程序是在DDR3内存中运行 
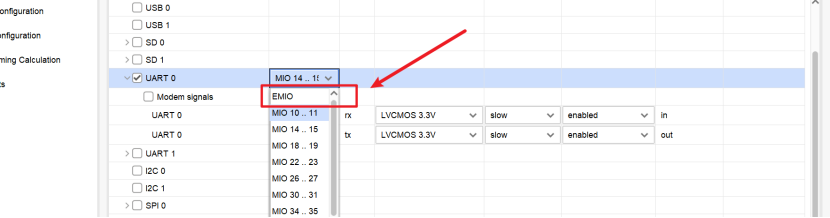
block设计其实可以通过model选择EMIO引脚的,但是我们此实验用的是MIO,不用设置不用勾选 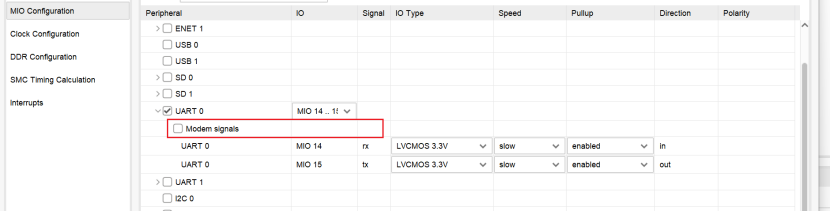
其实这些就是modem里的一些信号,但是平时不怎么用,只用到TXD和RXD就ok 
配置波特率
vivado里可以对uart的波特率进行配置,这里配置完以后其实可以在sdk/vitis里通过软件重新配置的 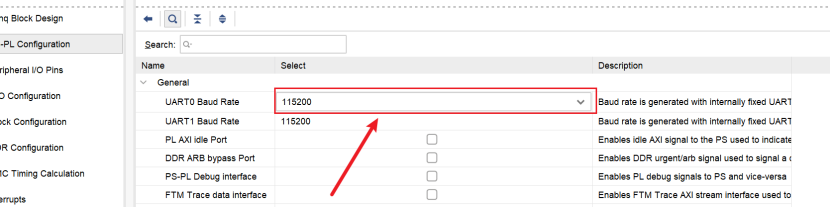
此刻我们用到的是MIO14和MIO15,但是如果想连接到EMIO也可以在这里配置成EMIO 
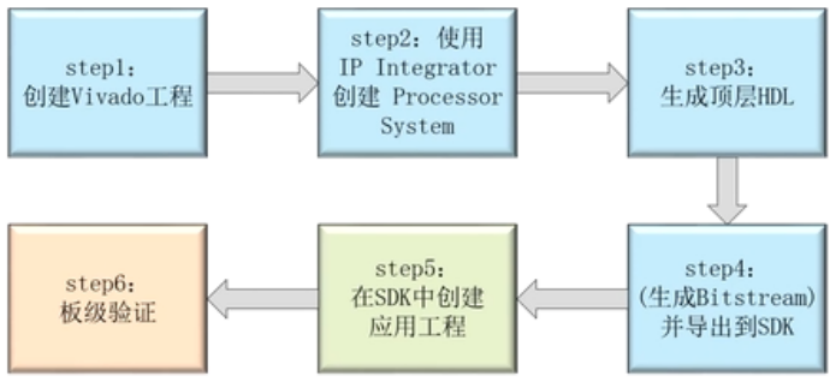
创建工程以后
首先要对使用的模块进行初始化
即对uart控制器和中断控制器进行初始化,并关联中断函数
塞林斯driver里给了实例 


导入到工程中
通过看官方例程发现一个大致规律,若使用一个ps的外设,操作类似
GPIO中断:1、配置。2、使能外设中断。3、对中断控制器配置。
UART中断:1、配置。2、对中断控制器配置。3、关联中断处理函数并处理。4、清除中断
示例是怎么对串口进行配置的
查找配置→对串口进行初始化
#include "xparameters.h" //器件参数信息
#include "xstatus.h" //包含 XST_FAILURE 和 XST_SUCCESS 的宏定义
#include "xil_printf.h" //包含 print()函数
#include "xgpiops.h" //包含 PS GPIO 的函数
#include "sleep.h" //包含 sleep()函数
#include "xscugic.h" //XScuGic类型变量 的头文件
#include <stdio.h>
//宏定义 GPIO 和 GIC 器件的ID
#define GPIO_DEVICE_ID 0 // XPAR_XGPIOPS_0_BASEADDR
#define INTC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID
//Gpio的中断号就是52,XPAR_XGPIOPS_0_INTR就是52
#define GPIO_INTERRUPT_ID XPAR_XGPIOPS_0_INTR
//连接到 MIO 的 LED
#define MIOLED0 0
//设置ps端按键key
#define MIO12_KEY 12
XGpioPs_Config * ConfigPtr; //实例
XScuGic_Config *IntcConfig; //中断控制器实例
XGpioPs Gpio; // GPIO 设备的驱动程序实例
XScuGic Intc; // 中断程序 的驱动实例
void SetupInterruptSystem(XScuGic *GicInstancePtr, XGpioPs *Gpio,u16 GpioIntrId);
void IntrHandler();
u32 key_press;
int main(){
u32 led_value = 0 ;
printf("GPIO INTERRUPT Test! \n\r");
//根据器件的ID,查找器件的配置信息
ConfigPtr = XGpioPs_LookupConfig(GPIO_DEVICE_ID);
//初始化GPIO驱动
XGpioPs_CfgInitialize(&Gpio, ConfigPtr,ConfigPtr->BaseAddr);
//设置指定引脚的方向:0 输入,1 输出
XGpioPs_SetDirectionPin(&Gpio, MIOLED0, 1);
//使能指定引脚输出:0 禁止输出使能,1 使能输出
XGpioPs_SetOutputEnablePin(&Gpio, MIOLED0, 1);
//设置中断系统
SetupInterruptSystem(&Intc,&Gpio, GPIO_INTERRUPT_ID);
while (1)
{
if(key_press){
led_value = ~led_value;
key_press = 0;
//清除之前的中断状态寄存器中的INT State,语句在gpiops.h里XGpioPs_IntrClearPin
XGpioPs_IntrClearPin(&Gpio, MIO12_KEY);
//将led_value的值写入led
XGpioPs_WritePin(&Gpio, MIOLED0, led_value);
usleep(200000);//按键消抖
XGpioPs_IntrEnablePin(&Gpio, MIO12_KEY);
//中断逻辑里有INT State寄存器,当第一次中断触发之后这个寄存器就会写1,不会自动清零。如果中断再次使能,随即会再次产生一个中断(但是中断事件并没有发生)
//因此在使能之前需要先清零
}
}
return 0;
}
//三个变量:中断控制器的驱动实例指针,GPIOPS驱动的实例指针,GPIO中断ID号
void SetupInterruptSystem(XScuGic *GicInstancePtr, XGpioPs *Gpio,
u16 GpioIntrId)
{
//查找GIC器件的配置信息,并初始化
IntcConfig = XScuGic_LookupConfig(INTC_DEVICE_ID);
XScuGic_CfgInitialize(GicInstancePtr, IntcConfig,IntcConfig->CpuBaseAddress);
//初始化arm处理器异常句柄,这两个函数每次使用中断时都需要调用
Xil_ExceptionInit();
//来给 IRQ 异常注册处理程序
Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT,
(Xil_ExceptionHandler)XScuGic_InterruptHandler,
GicInstancePtr);
//使能处理器的中断
Xil_ExceptionEnableMask(XIL_EXCEPTION_IRQ);
//关联中断处理函数,变量有:中断控制器驱动实例指针,GPIO中断ID号52,中断的处理函数句柄,回调参考通常是驱动的指针
XScuGic_Connect(GicInstancePtr, GpioIntrId,
(Xil_ExceptionHandler)IntrHandler,
(void *)Gpio);
//为GPIO器件使能中断
XScuGic_Enable(GicInstancePtr, GpioIntrId);
//设置MIO引脚的中断触发类型为下降沿触发
XGpioPs_SetIntrTypePin(Gpio, MIO12_KEY, XGPIOPS_IRQ_TYPE_EDGE_FALLING);
//打开MIO引脚的中断使能信号
XGpioPs_IntrEnablePin(Gpio, MIO12_KEY);
}
void IntrHandler(){
printf("interrupt detected!\n\r");
key_press = 1 ;
XGpioPs_IntrDisablePin(&Gpio, MIO12_KEY);
}贡献者
 dz13718198068
dz13718198068